

§ 41. Механические характеристики электродвигателей постоянного тока
В установившемся
режиме работы напряжение U, приложенное
к цепи якоря электродвигателя постоянного
тока, уравновешивается электродвижущей
силой Е, индуктируемой в обмотке якоря,
и падением напряжения в якорной цепи
I![]() r
,
т. е.
r
,
т. е.
U = E + I r ,
где I r - ток в цепи якоря электродвигателя, А; r - сопротивление цепи якоря электродвигателя, Ом.
Э. д. с., наводимая в обмотке якоря, зависит от угловой скорости вращения ω и магнитного потока возбуждения:
Е = kωФ,
где k
= pN/(2![]() a)
— постоянный конструктивный коэффициент
машины постоянного тока, который зависит
от числа пар полюсов машины р,
числа активных проводников обмотки
якоря N
и числа пар параллельных ветвей якоря
а.
a)
— постоянный конструктивный коэффициент
машины постоянного тока, который зависит
от числа пар полюсов машины р,
числа активных проводников обмотки
якоря N
и числа пар параллельных ветвей якоря
а.
После подстановки
в уравнение равновесия электродвижущих
сил значения э. д. с. якоря электродвигателя
и решения его относительно угловой
скорости вращения ω,
с![]() ,
будем иметь:
,
будем иметь:
ω =
![]() ,
,
где r
= r![]() + r
+ r![]() - полное сопротивление цепи якоря
электродвигателя, которое состоит
из сопротивления якорной обмотки r
и добавочного активного сопротивления
r
в цепи якоря.
- полное сопротивление цепи якоря
электродвигателя, которое состоит
из сопротивления якорной обмотки r
и добавочного активного сопротивления
r
в цепи якоря.
Полученное выражение называется уравнением электромеханической характеристики.
Электромагнитный
момент М![]() ,
Н·м, развиваемый электродвигателем,
зависит от тока якоря I
и магнитного потока возбуждения Ф:
,
Н·м, развиваемый электродвигателем,
зависит от тока якоря I
и магнитного потока возбуждения Ф:
М = k I Ф,
Откуда значение тока якоря
I = М /(kФ)
Подставив в уравнение электромеханической характеристики значение тока якоря, получим уравнение механической характеристики электродвигателя постоянного тока:
ω =
![]() ,
,
Первый член правой части этого уравнения представляет собой скорость идеального холостого хода ω , когда двигатель работает с моментом M = 0 и током I = 0,
ω =![]() ,
,
Второй член правой
части уравнения механической
характеристики представляет собой
перепад угловой скорости
![]() ω,
определяющий крутизну
характеристики,
ω,
определяющий крутизну
характеристики,
ω
=![]() ,
,
или из уравнений электромеханической характеристики
Δω
=
![]() ,
,
Угловую скорость двигателя ω, которую он развивает при любом моменте М , можно представить как разность угловой скорости идеального холостого хода и перепада Δω:
ω = ω - Δω
У двигателей независимого (рис. 2.83, а) и параллельного (рис 2.83, б) возбуждения ток возбуждения I не зависит от тока якоря I , следовательно, и от тока нагрузки I. Поэтому в практических расчетах принято считать, что магнитный поток Ф этих двигателей не зависит от тока нагрузки, а электромеханические и механические характеристики являются прямыми линиями (рис. 2.83, в).
Естественные характеристики электродвигателя строятся по двум точкам с координатами:
- механическая при
М
=
0, ω = ω
и М
=
М![]() ,
ω = ω
;
,
ω = ω
;
- электромеханическая при I = 0, ω = ω и I = I , ω = ω .
При определенном масштабе эти характеристики будут совпадать и изображаться одной прямой линией.
Естественные характеристики можно построить по паспортным данным электродвигателя: U , I , n , Р . Номинальную угловую скорость находим по номинальной частоте вращения:
ω = π n /30
Угловую скорость идеального холостого хода определяем из выражения
ω = ω U /(U -I r )
Сопротивление обмоток якорной цепи находим по формуле
r
=0,5(U
/I
)(1-![]() )
)
где = Р /(U /I ) - к. п. д. электродвигателя при номинальной нагрузке.
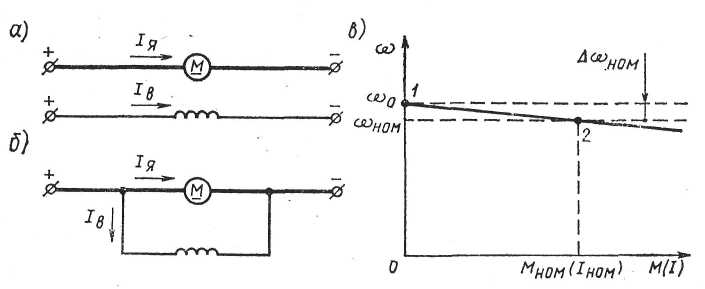
Рис. 2.83. Схема включения электродвигателей:
а – независимого возбуждения; б – параллельного возбуждения; в – их механическая и электромеханическая характеристики.
Номинальный момент, Н·м, развиваемый электродвигателем, определяем из выражения
М = Р / ω
Искусственные механические характеристики при введении различных добавочных сопротивлений реостата r строятся также по двум точкам при
М
=
0, ω = 0 и М
=
М
,
ω = ω![]() ,где
ω
- угловая скорость при номинальном
моменте двигателя и дополнительном
сопротивлении r
.
,где
ω
- угловая скорость при номинальном
моменте двигателя и дополнительном
сопротивлении r
.
Значение ω находят из уравнения
ω = ω [1- I (r + r )/ U ]
При введении в цепь якоря добавочных резисторов с активными сопротивлениями r увеличивается перепад скорости Δω, а следовательно, и крутизна механических характеристик (рис. 2.84, а). При этом скорость идеального холостого хода ω остается неизменной. При изменении напряжения U, подводимого к цепи якоря двигателя, будет изменяться угловая скорость идеального холостого хода ω , а перепад скорости Δω останется неизменным (рис. 2.84, б).
Изменение магнитного потока Ф вызовет как изменение скорости идеального холостого хода ω , так и перепад скорости Δω (рис 2.84, в).
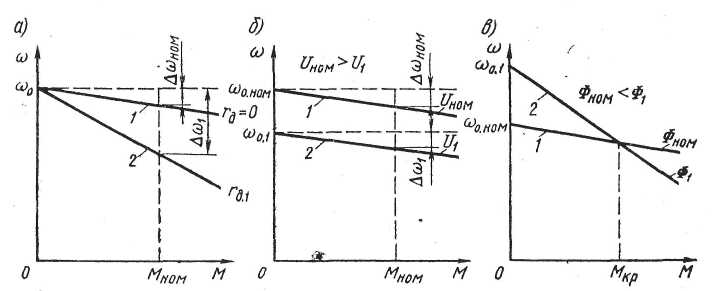
Рис. 2.84. Механические характеристики (1- естественная; 2 - искусственная;) двигателя с параллельным возбуждением при изменении: а - сопротивления; б - напряжения; в - магнитного потока.
У двигателей последовательного возбуждения (рис. 2.85, а) ток нагрузки протекает по обмотке якоря и по обмотке возбуждения, т. е. I = I = I . Поэтому
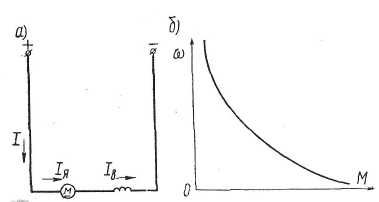
Рис. 2.85. Схема включения (а) и механическая характеристика (б) двигателя последовательного возбуждения.
ток возбуждения I , а следовательно, и магнитный поток Ф у этих электродвигателей зависят от тока нагрузки, т. е. Ф = f(I). Это обусловливает криволинейность механической характеристики (рис. 2.85, б). Для построения механических и электромеханических характеристик электродвигателей последовательного возбуждения применяют графоаналитический метод, используя готовые естественные универсальные характеристики, которые даются заводами - изготовителями в каталогах для каждой серии двигателей. Универсальные характеристики представляют собой экспериментально снятые в заводских лабораториях зависимости ω = f(I) М = f(I), выраженные в относительных единицах или в процентах от номинального значения (рис. 2.86, а). По этим двум характеристикам можно построить в относительных единицах естественную универсальную механическую характеристику ω = f(М) (рис. 2.86, б).
Зная номинальные параметры электродвигателя, можно построить его механическую и электромеханическую характеристики в абсолютных значениях, умножая относительные значения параметров, полученных по универсальной характеристике, на их соответствующие номинальные значения.
Из рассмотренных характеристик электродвигателя постоянного тока последовательного возбуждения видно, что при нагрузке I=0 угловая скорость двигателя стремится к бесконечности (разнос двигателя), так как магнитный поток Ф, создаваемый обмоткой возбуждения, стремится к нулю. Поэтому их нельзя пускать на холостом ходу и при нагрузке менее 25% номинальной.
Электродвигатели последовательного возбуждения обладают способностью развивать большие моменты при малых угловых скоростях вращения. Это обусловило их применение в тяговых и подъемно-транспортных механизмах.
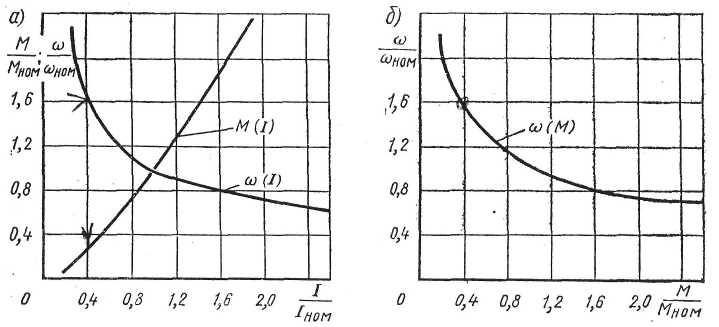
Рис. 2.86. Универсальные характеристики двигателей с последовательным возбуждением (серий МП и ДП).
Электродвигатели смешанного возбуждения (рис. 2.87, а) имеют две обмотки возбуждения: параллельную LМ2 и последовательную LМ1. Результирующий магнитный поток Ф создается суммарным действием магнитных потоков обеих обмоток:
Ф = Ф + Ф - согласное включение обмоток возбуждения;
Ф = Ф - Ф - встречное включение обмоток возбуждения, где Ф - магнитный поток параллельной обмотки возбуждения; Ф - магнитный поток последовательной обмотки возбуждения.
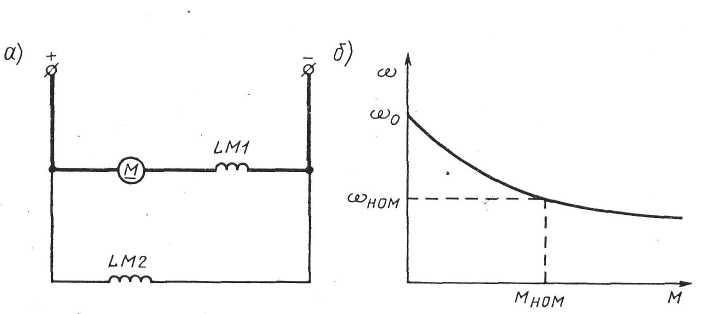
Рис. 2.87. Схема включения (а) и механическая характеристика (б) двигателя смешанного возбуждения.
На судах в основном применяются двигатели с согласным включением обмоток возбуждения.
В отличие от двигателей последовательного возбуждения двигатели смешанного возбуждения имеют конечные значения угловой скорости идеального холостого хода, который зависит от магнитного потока параллельной обмотки:
ω =U/(kФ )
Получить аналитическое выражение механической характеристики
(рис. 2.87, б) электродвигателя постоянного тока смешанного возбуждения из-за трудноучитываемых факторов очень сложно. Поэтому их механические и электромеханические характеристики строятся так же, как и у двигателей последовательного возбуждения по универсальным характеристикам ω = f(I) и М = f(I), экспериментально снятыми заводами-изготовителями.