Завдання на лабораторну роботу:
Виконати спектральний аналіз стандартного прямокутного сигналу за допомогою програми Discret, при кількості гармонік 2,4,8,16;
Проробити ті самі перетворення зі стандартним трикутним сигналом.
В протоколі привести отримані графіки та математичні залежності.
Зробити висновки по проробленій роботі.
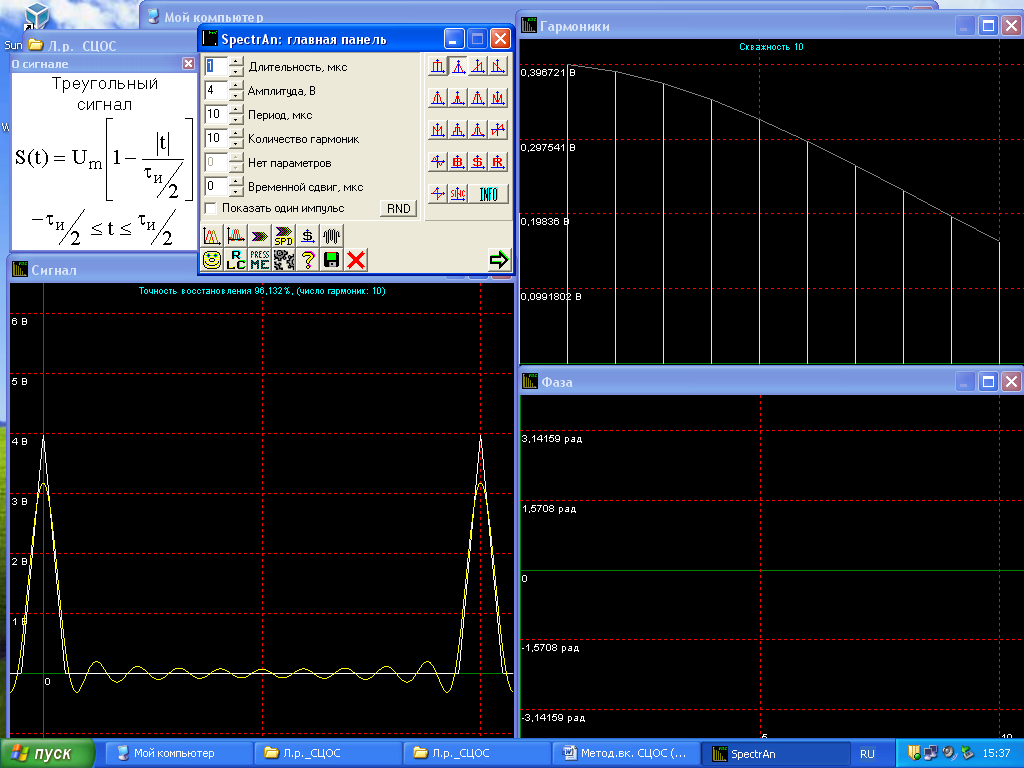
Приклад виконання роботи:
Приклад спектрального аналізу прямокутного сигналу з кількістю гармонік – 10. Отриманий графік:
Контрольні запитання:
Що таке спектр сигналу?
Поясніть зміст принципу невизначеності.
Лабораторна робота №5
НЕ РЕКУРСИВНІ ЦИФРОВІ ФІЛЬТРИ (НРЦФ)
Мета: Навчитися розраховувати та будувати НРЦФ
Програмне забезпечення: NUMERI
Теоретичні відомості
Цифрові фільтри:
Якщо алгоритм лінійного дискретного фільтру реалізується на аналогових елементах операційний підсилювач, то дискретний фільтр буде мати ті ж недоліки, що і в аналоговому, тобто зміна параметрів пристрою призводить до неконтрольованої похибки вихідного сигналу. Тому використовують цифрові фільтри.
Цифровий фільтр - це пристрій, який виконує алгоритм лінійного дискретного фільтру (як і у дискретного), але при цьому вхідний і вихідний сигнали є цифровими, так що у пристрої циркулюють лише двійкові коди. Але при цьому виникає похибка при заокругленні (добутку особливо), але це контрольована похибка, що не залежить від умов роботи фільтра. Її можна зменшити, збільшуючи число розрядів. Через цю похибку (кінцевого числа розрядів) цифровий пристрій не точно реалізує алгоритм (4.2). Тому вихідний сигнал відрізняється від точно вирішуваної ф-ли (4.2). І весь пристрій є нелінійним.
А зі збільшенням розрядності сигнал можна вважати дискретним, а цифровий фільтр лінійно-дискретним із залученням мат. апарата їх опису.
Дискретні і цифрові фільтри поділяються на два класи:
Нерекурсивні
якщо у формулі (4.2) усі коефіцієнти aj=0, то
у(nT)=![]() blx((n-l)T)
(4.1)
blx((n-l)T)
(4.1)
і описують пристрої без зворотного звязку
рекурсивні
Якщо б хоча б один коефіцієнт аj не дорівнює 0, описують пристрої із зворотним звязком.
Передаточні функції фільтрів
Передаточною функцією H(z) називають відношення z-образів вихідного Y(z) і вхідного X(z) сигналів фільтра при нульових початкових умовах.
H(z)=
![]()
Для рекурсивного фільтра з формули для лінійного дискретного фільтру
y(nT)=
-![]() ajy((n-j)T)+
blx((n-l)T)
ajy((n-j)T)+
blx((n-l)T)
отримуємо:
Hp
(z)=
 (4.2)
(4.2)
Для нерекурсивних фільтрів отримаємо:
HH
(z)=![]() (4.3)
(4.3)
Коефіцієнти фільтрів aj і bl є коефіцієнтами відповідних передаточних ф-цій.
Основні форми реалізації рекурсивних фільтрів
Пряма форма відповідає безпосередній реалізації фільтра за ф-лою для лінійного дискретного фільтру чи (4.2)
Для нерекурсивного : аj=0 і тому нижньої частини не буде.
2) Канонічна форма дозволяє зменшити число елементів затримки у порівнянні з їх кількістю при прямій формі реалізації до мінімуму.
Відповідає заміні ф-ли для лінійного дискретного фільтру еквівалентною системою різносних рівнянь.
Отримали це так:
H(z)=H1(z) H2(z) де:
![]()
3) Каскадна форма (послідовна) представляє собою каскадне з’єднання однотипних ланок, що відповідає представленню H(z) у вигляді добутку.
![]()
 ,
,
де L-кількість окремих ланок, що називаються біквадратними блоками. Біквадратний блок є універсальною ланкою, що підходить для побудови будь-яких фільтрів.
4) Паралельна форма реалізації, що представляє собою паралельне з’єднання, відповідне представленню H(z) у вигляді Суми. А сама схема – паралельне з’єднання біквадратних блоків при β2к=0
Приклади побудови цифрових фільтрів
y (nT) = 0.2+0.3y((n-1)T)+2x((n-2)T)
Пристрій будується дуже просто, з суматора.
y (nT)= 0.2+0.3iy ((n-1)T)+0.2y ((n-2)T)+ix (nT)
y (nT)= y1 (nT)+iy2 (nT)
y1 (nT)= 0.2-0.3y2 (n-1)T+0.2y1((n-2)T)
y2 (nT)= 0.3y1 ((n-1)T)+0.2y2 ((n-2)T)+x (nT)
![]() ;
H2
(z)= 0.2+z -1
+
z –2;
;
H2
(z)= 0.2+z -1
+
z –2;
Знаки,
які стоять у різносному рівнянні і в
передній функції мають різні значення,
тобто
![]()
![]()
![]()
Коефіцієнти зверху лишаються з тим же знаком, а знизу міняють свій знак на протилежний.
x (nT)
Побудуємо фільтр у прямій формі:
![]()
В канонічній формі:
![]()
Основні етапи проектування нерекурсивних фільтрів
Підготовчий. Математичне формулювання задачі складається з кроків:
1.Вибір типу фільтра.
Вибирається один з двох класів фільтра, будуть або лінійною ФЧХ, або мінімально фазовою.
2.Вибираємо апроксимуючу функцію
,c, значення якої визначають потрібну характеристику фільтра, найбільш часто АЧХ.
– нормована частота
с – вектор коефіцієнтів, що співпадає з вектором коефіцієнтів фільтра В або досить просто звязаний з ним.
3.Визначення апроксимованої ф-ції
![]() ,
яка задає вимоги до заданої характеристики.
,
яка задає вимоги до заданої характеристики.
4.Вибір критерію апроксимації, тобто уточнення змісту наближеної рівності
![]()
при
заданих значеннях
![]()
5.Визначення
вагової ф-ції апроксимації
![]() ,
яка задає вимоги до точності останнього
наближеної рівності.
,
яка задає вимоги до точності останнього
наближеної рівності.
Метою першого етапу є математичне формулювання задачі обчислення вектора коефіцієнта С за заданими вимогами до характеристик фільтру.
2 етап. Розвязання задачі апроксимації. Складається з таких кроків:
Оцінка необхідного порядку фільтра N.
Розрахунок коефіцієнтів вектора С.
Перевірка критерію отримання рішення (виконання заданих вимог до характеристик фільтра).
А) Якщо вимоги до характеристик виконуються , то за вектором коефіцієнтів С визначають вектор B.
2 етап закінчується.
В) Якщо вимоги не виконуються, то повертаються до початку другого етапу і розраховують вектор С при більшому значенні N.
Метою 2-го етапу є визначення вектора коефіцієнтів фільтра B.
3 етап. Розрахунок розрядності Sk коефіцієнтів або розрядності регістрів ПЗП – залежить від вибраної елементної бази.
При реалізації на спеціальному мікропроцесорі (DSP) виходить, що Sk одразу задане. Тоді на цьому кроці перевіряють, чи виконуються задані вимоги до характеристик фільтра.
А) Якщо виконуються, переходимо до 4 етапу, В) якщо ні, то вертаються на 2 етап, задають більше N і знову розвязують задачу апроксимації і переходять до 3 етапу.
Якщо фільтр реалізується на БІС загального застосування або універсальному мікропроцесорі, то необхідно мінімізувати Sk до тих пір, поки задані характеристики не перестануть виконуватися.
4 етап. Розраховуємо розрядність регістрів ОЗП, так щоб потужність шумів фільтра була менше ніж потужність шуму на вході.
5 етап. Здійснюється схемна реалізація фільтра на обраній елементній базі.
каскадній формі:
y (nT)= -0.2y (n-1)T+0.4y (n-2)T+0.8y ((n-3)T)+x ((n-1)T)+0.3 x (nT)
![]()
Паралельна форма – це сума двох членів
 .
.
Проектування рекурсивних цифрових фільтрів (РЦФ).
Є три основні класи розрахунку рекурсивних фільтрів.
1.Методи перетворення аналогових фільтрів у цифрові (метод білінійного перетворення).
2.Прямі методи розрахунку РЦФ у z-площині.
3.Методи, що використовують алгоритми оптимізації.
Метод білінійного перетворення
Перетворює передаточну ф-цію T(S) аналогового фільтра у відповідну передаточну ф-цію H(z) РЦФ. Дане перетворення може бути виконане вручну або на ЕОМ.
Для того, щоб розрахувати РЦФ, потрібно знати аналоговий фільтр і найбільш протабульовані такі фільтри :
Найбільш розповсюджені аналогові фільтри.
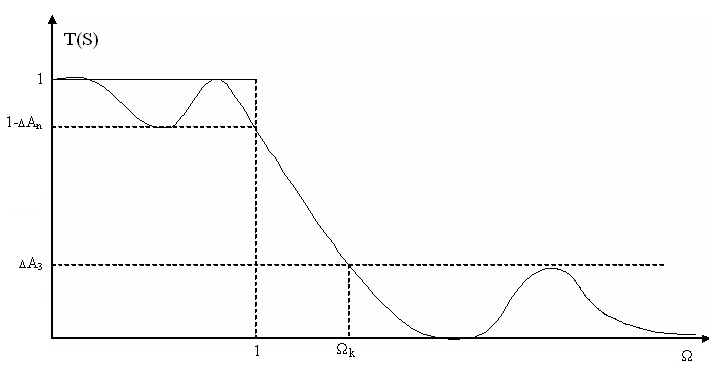
1.) Фільтри Баттерворта (тип В) з монотонно спадною АЧХ , при >0.
АЧХ:
Aз-затримання
An-пропускання
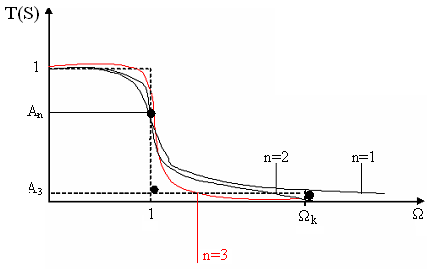
АЧХ A=f() нормованих передаточних ф-цій фільтра.
среза=1.
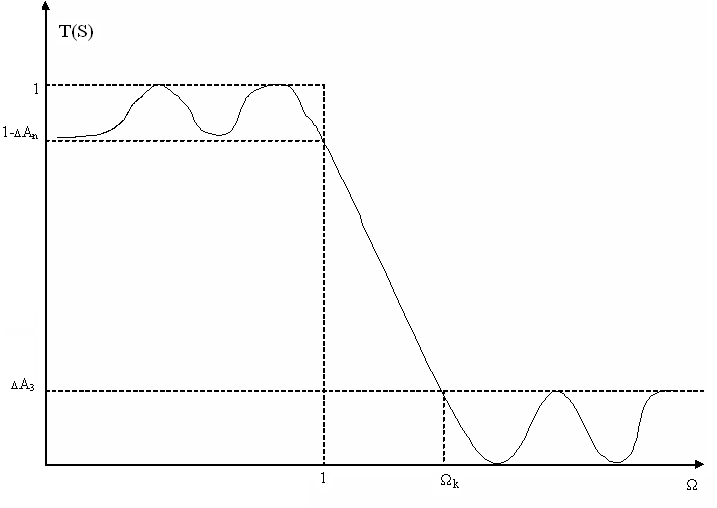
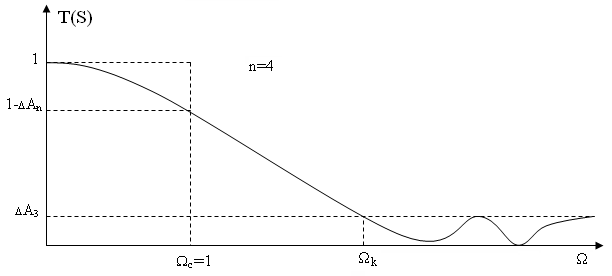
2.) Фільтри Чебишева (тип Т) АЧХ рівнохвильова у полосі пропускання і монотонно спадна у полосі затримання.

3.) Інверсний Чебишева (тип I) АЧХ монотонно спадна у полосі пропускання і рівнохвильова у полосі затримування.
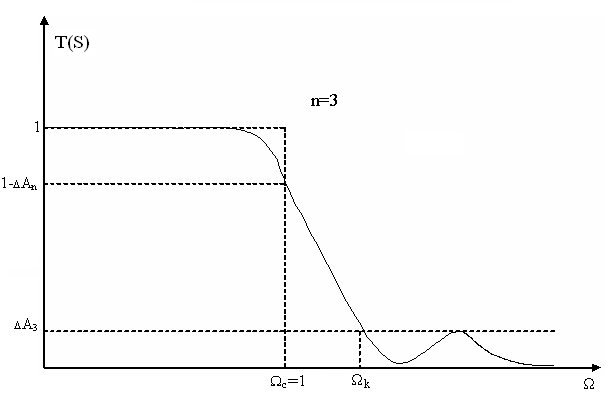
4.Золотарева-Кауера (тип С)
(еліптичний фільтр)
АЧХ рівнохвильова у полосі пропускання і затримування.