

Лабораторная работа №9 испытание асинхронной машины в режимах индукционного регулятора, фазорегулятора и регулируемой реактивной катушки общие сведения
Асинхронная машина с фазным ротором, помимо двигательного и генераторного режимов, может быть использована. Во многих случаях специально рассчитана и сконструирована, для работы в качестве индукционного регулятора (поворотного автотрансформатора), фазорегулятора (поворотного трансформатора) и регулируемой реактивной (дроссельной) катушки.
Индукционные регуляторы позволяют плавно и в сравнительно широких пределах регулировать вторичное напряжение. Поэтому они применяются в отдельных линиях станций и подстанций, для широкого регулирования напряжения отдельных приемников, например электродвигателей, электропечей, и главным образом в лабораторной практике.
Фазорегуляторы позволяют плавно поворачивать фазу вторичного напряжения (не изменяя его по величине) относительно первичного в пределах угла а = 0°÷360° эл. Они применяются для регулирования угла зажигания ионных выпрямителей, в автоматике, в измерительной технике и особенно в лабораторной практике.
Регулируемые реактивные катушки позволяют плавно изменять реактивное сопротивление, что дает возможность применять их для создания практически чисто индуктивной нагрузки генераторам переменного тока. Используются они преимущественно в лабораторной практике.
Во всех выше указанных режимах асинхронная машина работает при неподвижном роторе, и поэтому вопрос ее охлаждения имеет большое значение.
При малой мощности и небольшом напряжении они выполняются с воздушным охлаждением, а при средних и больших мощностях они имеют преимущественно масляное охлаждение и вертикальное исполнение.
Целью данной работы является исследование работы асинхронной машины с фазным ротором в режимах индукционного регулятора, фазорегулятора и регулируемой реактивной катушки.
ВЫПОЛНЕНИЕ РАБОТЫ
1. Индукционный регулятор
Индукционный регулятор представляет собой трехфазную асинхронную машину с фазным ротором, обмотки статора ротора которой электрически соединены, а ротор заторможен при помощи червячной передачи. Последняя при необходимости используется для изменения расположения ротора относительно статора.
Электрическая схема трехфазного индукционного регулятора представлена на рис.9.1.
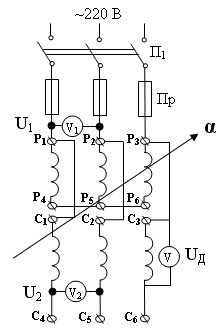
Рисунок 9.1 – Схема индукционного регулятора
Обмотка, которая присоединяется к сети параллельно, называется первичной, или питающей. Она обычно соединена звездой, изредка встречается соединение её треугольником. Другая обмотка, называемая вторичной, или проходной, имеет разомкнутые фазы. Она присоединяется к сети последовательно, т. е. между сетью и потребителем, требующим регулирования напряжения.
В специально изготовленных заводами индукционных регуляторах первичной обмоткой, как правило, является обмотка ротора, а вторичной — обмотка статора.
Если же в качестве индукционного регулятора используется асинхронный двигатель с фазным ротором, то первичной обмоткой преимущественно является обмотка статора, а вторичной — обмотка ротора.
Принцип работы индукционного регулятора заключается в следующем. Ток I1 протекающий по первичной обмотке, создает вращающееся магнитное поле, которое наводит в обмотках индукционного регулятора электродвижущие силы Е1Ф и Е2Ф: в первичной Е1Ф = сФW1 и во вторичной Е2Ф = сФW2 , где Ф — поток вращающегося магнитного поля; W1 и W2 — число витков первичной и вторичной обмоток (на одну фазу); с — постоянный коэффициент.
Электродвижущая сила первичной обмотки Е1Ф при отсутствии нагрузки индукционного регулятора практически равна напряжению сети U1Ф и находится с ним в противофазе.
Электродвижущая сила вторичной обмотки Е2Ф, определяемая неизменным по величине магнитным потоком Ф и количеством витков W2, имеет конкретное, неизменное по величине, значение. Направление ее по отношению к напряжению сети может быть различным в зависимости от взаимного расположения первичной и вторичной обмоток, которое можно изменить при помощи червячной передачи.
Вторичное напряжение (напряжение на выходе) индукционного регулятора U2 представляет собой геометрическую сумму напряжения сети U1Ф, подводимого к первичной обмотке, и э. д. с. Е2Ф, индуктируемой во вторичной обмотке, т. е.
![]() ,
,
![]() .
(9.1)
.
(9.1)
Из
этого выражения видно, что при плавном
изменении угла между осями обмоток
соответствующих фаз ротора и статора
от 0° до ±180° эл. (электрических градусов)
вторичное напряжение индукционного
регулятора будет плавно
изменяться от своего наибольшего
значения
![]() до наименьшего
до наименьшего
![]() .
.
При
одинаковом количестве витков первичной
и вторичной обмоток индукционный
регулятор,
работающий без загрузки, позволяет
изменять вторичное напряжение
в пределах
от 0 до 2![]() .
Верхний
предел регулирования напряжения при
нагрузке регулятора заметно снижается.
.
Верхний
предел регулирования напряжения при
нагрузке регулятора заметно снижается.
Зависимость вторичного напряжения U2 от угла поворота ротора α при холостом ходе индукционного регулятора. Снятие зависимости U2 =f(α) при I2=0 производят по схеме, представленной на рис.9.1, в такой последовательности.
Первичную
обмотку индукционного регулятора
включают на сеть (рубильник П1).
Затем определяют напряжение U1Ф=![]() ,
подводимое к первичной обмотке, э. д. с.
Е2Ф,
индуктируемую во вторичной обмотке,
и проверяют симметрию вторичного
напряжения U2.
,
подводимое к первичной обмотке, э. д. с.
Е2Ф,
индуктируемую во вторичной обмотке,
и проверяют симметрию вторичного
напряжения U2.
Значение напряжения U1Ф, и э. д. с. Е2Ф записывают в табл.9.1.
Линейные напряжения U2 при симметричном напряжении U1 должны быть одинаковыми. Если они значительно отличаются друг от друга, то это указывает на несоответствие присоединения первичной и вторичной обмоток в схеме индукционного регулятора. Несимметрия вторичного напряжения при этом получается за счет различных углов между обмотками соответствующих фаз ротора и статора. Чтобы получить симметричное вторичное напряжение, необходимо на зажимах сети поменять местами два провода, с помощью которых подводится напряжение к обмотке статора или ротора.
Далее, при помощи поворотного устройства устанавливают ротор в положение, при котором вторичное напряжение индукционного регулятора будет максимальным U2макс. Это положение ротора соответствует совпадению осей обмоток ротора и статора, т. е. напряжение U1Ф и э. д. с. Е2Ф совпадают по фазе (угол α, определяемый по укрепленной на статоре шкале, равен ±180º). Плавно поворачивая ротор от его исходного положения (α = 180°) до положения, при котором угол α = 0° эл.; через каждые 15° эл. значения угла α измеряют вторичное напряжение U2.
Результаты измерений и вычислений заносят в табл. 9.1.
По данным табл. 9.1 на одном графике строят зависимости U2=f(α) и U2расч=f(α) – теоретически должны совместиться. Примерный вид этой зависимости представлен на рис. 9.2.
U1ф=
U1/ |
|||||||||||||
α° |
-180 |
-165 |
-150 |
-135 |
-120 |
-105 |
-90 |
-75 |
-60 |
-45 |
-30 |
-15 |
0 |
U2ф, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
U2рас, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
α° |
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
165 |
180 |
U2ф, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
U2рас, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 9.1 – Зависимости напряжений от угла поворота ротора

Рисунок 9.2 – Зависимость выходного напряжения индукционного регулятора от угла поворота
Векторная диаграмма напряжений. Векторную диаграмму напряжений для одной фазы индукционного регулятора строят на основании полученных из опыта значений напряжения U1Ф, подводимого к первичной обмотке, и э. д. с. Е2Ф, индуктируемой во вторичной обмотке.
Построение производят в такой последовательности. От начала координат (рис. 9.3) в выбранном масштабе откладывают вектор напряжения U1Ф. На продолжении этого вектора в том же масштабе откладывают вектор э. д. с. Е2Ф. Из конца вектора напряжения U1Ф, как из центра, описывают окружность радиусом, равным вектору э. д. с. Е2Ф. Эта окружность является геометрическим местом концов вектора э. д. с. Е2Ф и векторов вторичного напряжения U2Ф, при различных углах поворота α ротора индукционного регулятора.
Отложив вектор э. д. с. Е2Ф под любым заданным углом α и соединив конец этого вектора с началом координат, получают в масштабе значение вторичного напряжения U2Ф для данною угла поворота индукционного регулятора. Векторная диаграмма показана на рисунку 9.9.

Рисунок 9.3 – Векторная диаграмма индукционного регулятора для одной фазы
Рабочие характеристики. Рабочие характеристики индукционного регулятора представляют собой зависимости вторичного напряжения U2, тока I1, потребляемой мощности P1, коэффициента мощности cos φ1 и коэффициента полезного действия η от тока нагрузки I2 при постоянных подводимом первичном напряжении U1, частоте fH, угле поворота ротора α и коэффициента мощности нагрузки cos φ2, т. е. U2, I1, P1, cos φ1 и η = f(I2) при U1 = const, fH = const, α = const и cos φ2= const.
Схема для снятия рабочих характеристик индукционного регулятора представлена на рис. 9.4.
Опыт производят в такой последовательности. При выключенном рубильнике П2 индукционный регулятор включают на сеть рубильником П1. Затем его ротор поворачивают по отношению к статору на такой угол α, при котором вторичное напряжение U2 будет равно по величине первичному напряжению U1. При отключенной нагрузке (рубильник П2) показания приборов при холостом ходе работы индукционного регулятора записываем в таблицу 9.2. После этого включают активную нагрузку (рубильник П2) и, при неизменном ранее установленном положении ротора, постепенно увеличивают ток нагрузки I2 от нуля до значения, равного номинальному току вторичной обмотки индукционного регулятора. Ток нагрузки следует изменять через примерно равные интервалы так, чтобы в заданном диапазоне изменения получить 4 ÷ 5 точек снимаемых характеристик.
Результаты измерений и вычислений заносят в табл. 9.2.
Вычисляем потребляемую из сети активную мощность по формуле:
![]()
где Р1 — потребляемая из сети активная мощность; U1 — линейное напряжение, подводимое к первичной обмотке; I1 — ток первичной цепи.
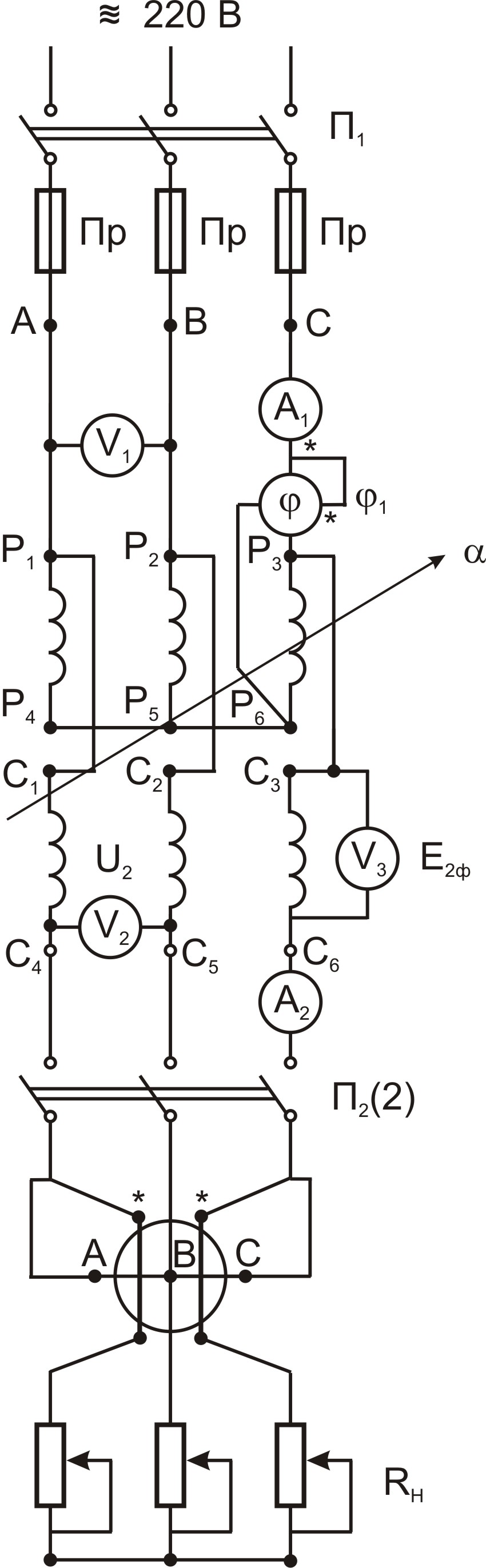
Рисунок 9.4 – Схема включения индукционного регулятора для снятия рабочих характеристик
Таблица 9.2 – Рабочие характеристики
№п.п. |
Опытные данные |
Расчетные данные |
||||||
U1 |
I1 |
cos1 |
U2 |
I2 |
P2 |
η |
P1 |
|
1.(х.х) |
|
|
|
|
|
|
|
|
2. |
|
|
|
|
|
|
|
|
3. |
|
|
|
|
|
|
|
|
4. |
|
|
|
|
|
|
|
|
5. |
|
|
|
|
|
|
|
|
6. |
|
|
|
|
|
|
|
|
Коэффициент полезного действия индукционного регулятора рассчитаем по формуле:
![]()
где Р2 - активная мощность потребляемая нагрузкой.

Рисунок 9.5 – Рабочие характеристики индукционного регулятора
По данным табл. 9.2 строят рабочие характеристики, примерный вид которых представлен на рис. 9.5.
Уменьшение вторичного напряжения U2 с увеличением тока нагрузки I2 объясняется увеличением падения напряжения на активном и индуктивном сопротивлениях первичной и вторичной обмоток индукционного регулятора.
Характер изменения тока первичной цепи I1 с увеличением тока нагрузки I2 объясняется следующим. При токе I2=0 ток I1 в основном реактивный, создающий вращающееся магнитное поле. Значение его из-за большого магнитного сопротивления воздушного зазора сравнительно велико и примерно равно току холостого хода асинхронной машины в режиме двигателя. При небольших значениях активного тока нагрузки, когда реактивная составляющая тока первичной цепи превышает его активную составляющую, изменение общего тока первичной цепи незначительно. Дальнейшее увеличение тока нагрузки приводит к более интенсивному изменению тока в первичной цепи. Это обуславливается в значительной степени увеличением его активной составляющей (внешней нагрузкой) и некоторым увеличением его реактивной составляющей (потоками рассеяния обмоток). Поэтому зависимость I1=f(I2) на графике изображается кривой, несколько выпуклой в сторону оси абсцисс.
Вид кривой η =f(I2) зависит от соотношения постоянных и переменных потерь в индукционном регуляторе при различных нагрузках. При небольших токах нагрузки основную часть потерь составляют потери в стали Рс, практически не зависящие от нагрузки. При этом потери в меди Рм, пропорциональные квадратам токов в обмотках, сравнительно малы. Поэтому с изменением тока нагрузки I2 от нуля до некоторой величины суммарные потери увеличиваются значительно медленнее полезной (отдаваемой) мощности, а к. п. д. резко возрастает. Затем, при дальнейшем увеличении тока нагрузки, рост к. п. д. замедляется, так как увеличивается влияние потерь в меди. При сравнительно больших токах нагрузки, близких к номинальному току, потери в меди, и следовательно суммарные потери, возрастают быстрее тока нагрузки, и к. п. д. индукционного регулятора уменьшается.
Зависимость Р1= f(I2) на графике имеет вид кривой, несколько выпуклой в сторону оси абсцисс. Это объясняется увеличением потерь в обмотках индукционного регулятора при увеличении тока нагрузки.
Характер кривой cos φ1 = f(I2) может быть вычеслен анализом уравнения:

где I1а и I1р —активная и реактивная составляющие тока в первичной цепи.
Из уравнения видно, что коэффициент мощности индукционного регулятора cos φ1 определяется соотношением токов I1а и I1р. При холостом ходе из-за значительного преобладания тока I1р над током I1а cos φ1 имеет небольшое значение. По мере увеличения активной нагрузки cos φ1 заметно возрастает. Это обуславливается тем, что ток I1а увеличивается в большей мере, чем ток I1р . При сравнительно больших нагрузках увеличение cos φ1 замедляется, так как ток I1р вследствие значительного увеличения потоков рассеяния обмоток заметно возрастает. Последнее приводит к тому, что при перегрузках