

21. Статика и динамика систем
Равновесные и неравновесные состояния систем
В промышленных условиях автоматические системы, а также их отдельные элементы, могут находиться в равновесных (статических) и неравновесных (динамических) состояниях.
Равновесные состояния характеризуются постоянством во времени входных промежуточных и выходных величин. При эксплуатации объектов в химической технологии равновесные состояния нарушаются в результате действия различных возмущений, при этом входные, промежуточные и выходные величины систем изменяются во времени; такое их состояние называют неравновесным. При изучении автоматических систем основное внимание уделяют их поведению в этом режиме. Исследование систем в равновесных и неравновесных состояниях проводят с помощью различных функциональных зависимостей, характеризующих поведение систем.
Уравнение статики и динамики
Поведение системы в установившемся состоянии определяется уравнениями статики, или статическими характеристиками. Под статической характеристикой понимают зависимость между входной Xвх и выходной Xвых величинами системы в равновесном состоянии.
Xвых=f(Xвх) (1)
Обычно уравнения статики являются алгебраическими.
Поведение системы в неравновесном состоянии или в переходном процессе описывается уравнениями динамики. В общем виде уравнение динамики или динамическая характеристика системы с входной Xвх и Xвых выходной величинами представляет собой зависимость типа
Xвых=f(Xвх, t) (2)
которая, как правило, представляет собой дифференциальное уравнение. Прохождение сигнала по каналам системы характеризуется своими уравнениями статики и динамики.
Поведение реальных систем обычно описывается нелинейными уравнениями. Решение таких уравнений довольно сложно, нахождение даже приближенного численного решения требует большого объема вычислений. Поэтому при инженерных методах анализа и расчета реальных систем применяют линеаризацию уравнений: нелинейные уравнения заменяют приближенными линейными, решать которые значительно проще.
22. Логометры.
Логометр — прибор магнитоэлектрической системы, используется для измерения температуры в комплекте с термопреобразователями сопротивления. Логометры выпускаются обычно с градуировкой шкалы в градусах Цельсия. Температурная шкала логометра действительна только для определенной градуировки термометра сопротивления и заданного значения сопротивления внешних соединительных проводов.
Измерительный механизм логометра состоит из 2 рамок, расположенных под некоторым углом одна к другой и жестко скрепленных между собой. Рамки помещены в воздушный зазор между полюсами постоянного магнита и сердечником. Воздушный зазор между полюсами постоянного магнита и сердечником сделан неравномерным и поэтому магнитная индукция в зазоре не постоянна.
Принципиальная схема логометра с внешним постоянным магнитом показана на рисунке 3.2.3. В межполюсном пространстве постоянного магнита на общей оси (двух кернах) укреплены 2 рамки Rp ‘ и Rp, изготовленные из тонкой изолированной медной проволоки. Эти рамки могут свободно поворачиваться в пределах рабочего угла в воздушном зазоре. Выточки полюсных наконечников выполнены по окружности, но радиус этих выточек смещен по отношению к центру сердечника так, что воздушный зазор убывает от центра полюсных наконечников к их краям, а магнитная индукция возрастает приблизительно по квадратичному закону от центра к краям наконечников.
 Рамки
логометров включены таким образом, что
их вращающие моменты
Рамки
логометров включены таким образом, что
их вращающие моменты
 и
и
 направлены
навстречу друг другу. Подвод тока к
рамкам осуществляется либо с помощью
«безмоментных» вводов, сделанных из
золотых ленточек, либо посредством
маломоментных спиральных волосков,
изготовленных из бронзовых сплавов. На
приведенной схеме R1
и R2
—
добавочные манганиновые резисторы, Rt
— сопротивление термометра сопротивления.
направлены
навстречу друг другу. Подвод тока к
рамкам осуществляется либо с помощью
«безмоментных» вводов, сделанных из
золотых ленточек, либо посредством
маломоментных спиральных волосков,
изготовленных из бронзовых сплавов. На
приведенной схеме R1
и R2
—
добавочные манганиновые резисторы, Rt
— сопротивление термометра сопротивления.
Как видно из рисунка, ток источника питания в точке а разветвляется и проходит по двум ветвям: через резистор R1, рамку Rp и через термометр Rt, резистор R2 и рамку Rp’.
В
точке b
ветви сходятся, и дальше ток идет до
одному проводнику до источника питания.
При протекании по рамкам Rp’
и Rp
токов I1
и I1’
создаются магнитные поля, в результате
взаимодействия которых с полем постоянного
магнита возникают вращающие моменты
соответственно Mp
и Mp‘,
направленные навстречу друг другу.
Если
 ,
то
,
то
 =
= и при симметричном расположении рамок
относительно полюсных наконечников
вращающие моменты будут равны (рамки
занимают положение, показанное на рис
).
и при симметричном расположении рамок
относительно полюсных наконечников
вращающие моменты будут равны (рамки
занимают положение, показанное на рис
).
Если
сопротивление термометра сопротивления
вследствие нагрева возрастает, то
вращающий момент рамки Rp
будет
больше момента рамки Rp’,
так как
 ,
и подвижная система начнет поворачиваться
по часовой стрелке, т.е. в направлении
момента
.
При этом рамка
,
и подвижная система начнет поворачиваться
по часовой стрелке, т.е. в направлении
момента
.
При этом рамка
 с большим вращающим моментом попадет
в более слабое магнитное поле и ее момент
уменьшится, момент же рамки
с большим вращающим моментом попадет
в более слабое магнитное поле и ее момент
уменьшится, момент же рамки
 ,наоборот,
будет увеличиваться . При определенном
угле поворота моменты сравняются и
рамки остановятся.
,наоборот,
будет увеличиваться . При определенном
угле поворота моменты сравняются и
рамки остановятся.
Основным
недостатком рассмотренной дифференциальной
логометрической схемы является то, что
для уменьшения температурной погрешности
прибора приходится включать последовательно
с рамками манганиновые резисторы с
большими сопротивлениями
 и
и
 .
Вследствие этого логометры с такой
измерительной цепью обладают меньшей
чувствительностью по сопротивлению по
сравнению с приборами с мостовыми
логометрическими схемами
.
Вследствие этого логометры с такой
измерительной цепью обладают меньшей
чувствительностью по сопротивлению по
сравнению с приборами с мостовыми
логометрическими схемами
УРАВНОВЕШЕННЫЕ МОСТЫ.
В качестве измерительных приборов, применяемых в комплекте с ТС, широко используются уравновешенные мосты и логометры, а в некоторых случаях — неуравновешенные мосты.
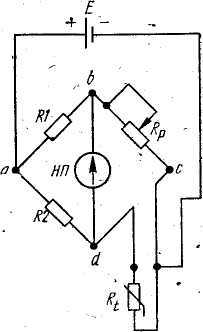

Уравновешенные мосты. Принципиальная электрическая схема уравновешенного моста (рис1) состоит из постоянных резисторов R1 и R2, компенсирующего переменного резистора (реохорда) RP, термопреобразователя сопротивления Rt и сопротивления соединительных проводов Rпр. В одну диагональ включен источник постоянного тока Е, в другую — нуль-прибор НП. Измерение Rt производится путем перемещения движка реохорда RP до тех пор, пока стрелка нуль-прибора не установится на нулевой отметке. В этот момент ток в измерительной диагонали cd отсутствует.
Если считать, что температура окружающей среды постоянна, то 2Rпр = const. Тогда каждому значению Rt соответствует определенное значение сопротивления реохорда RP, шкала которого проградуирована либо в Омах, либо в единицах неэлектрической величины (например, в градусах Цельсия), для измерения которой предназначена схема.
23. Объекты регулирования.Под объектом регулирования поним-ся аппарат, совокупность аппаратов или другое устр-ва, в которых одно или несколько выходных параметров поддерж-ся на заданном уровне ли изменяются по заданному з-ну.
ОР явл-ся центральным звеном АСР со своим входными и выходными величинами.
О сновным
возмущающим воздействием явл-ся нагрузка
под к-рым понимается кол-во в-ва и энергии
проходящей ч/з объект в единицу времени.
сновным
возмущающим воздействием явл-ся нагрузка
под к-рым понимается кол-во в-ва и энергии
проходящей ч/з объект в единицу времени.
 ,
,

Классификация ОР:
-По кол-ву выходных параметров ОР бывают одномерные и многомерные. Многомерные объекты могут быть с взаимосвязанными входн. величинами т.е. оказывать влияние на сразу несколько выходных параметров. Объекты с независимыми величинами проще моделир-ся. Такие объекты можно разбить на одномерные.
Различают ОР с сосредоточенными и распределенными параметрами .К объектам с сосредоточенными параметрами относят такие у которых выходная величина имеет в любой момент времени определенное численное значение (уровень воды в резервуаре).
К объектам с распред. параметрами относят такие у кот-рых выходная величина имеет разные числовые значения в разных точках объекта (t-ра по длинне теплообменника).
Такие ОР в Д.У. в частных произв. решать сложно. Поэтому на практике осуществляется разбивка таких объектов на несколько. Рассматривают их как объекты сосредоточенные.Поэтому точность тем выше чем на большее число объектов была сделана разбивка.
В зависимости от вида Д.У. ОР бывают: -первого порядка -второго порядка, n-го порядка
Первого порядка (теплообменники смешения, смесители, т.е. в-во или энергия нах-ся в одном резервуаре.Выходные величины таких объектов изм-ся благодаря согласованности входного и выходного потоков. Скорость изменения выходн. величин от аккумулятивных св-в объекта
Второго порядка относятся объекты ,в-ва или энергия нах-ся в 2-х резервуарах, а обмен осущ-ся ч/з трубопровод.
По способности вост-ся ОР дел-ся на: Устойчивые(статические),нейтральные,неустойчивые.
К основным динамическим св-вам ОР относят: Самовыравнивание, емкость, время запаздывания.
Именно от этих св-в зависит стр-ра АСР, тип регулятора и его настроечные параметры .