

1. Термометры сопротивления.
Омическое сопротивление проводников и полупроводников представляет некоторую функцию их температуры, т.е. R = ƒ(T°C) вид этой функции зависит от природы материала. Измеряя сопротивление нагретого проводника или полупроводника одним из известных методов и зная вид функции R = ƒ(T°C) для данного материала, можно определить его температуру, а следовательно, и температуру пространства или среды, в которую он помещён. При увеличении температуры сопротивления ряда чистых металлов возрастает, а полупроводников снижается.
Для изготовления ТС наиболее пригодны по своим физико-химическим платина и медь. Чувствительные элементы ТС представляют собой тонкую медную или платиновую проволоку намотанную бифилярно на специальный слюдяной, фарфоровый или пластмассовый каркас. Для предохранения от внешних воздействий чувствительные элементы ТС заключают в металлическую трубку с литой головкой, в которой смонтированы выводы концов обмотки для их подключения к соединительным проводам.
Термометры сопротивления изготавливают следующих типов:
ТС медные (ТСМ) на пределы от -50 до 200° С;
ТС платиновые (ТСП) на пределы от -200 до 600° С.
Выпускаются ТС с унифицированным выходным сигналом 0-5, 4-20 мА; ТСМУ на пределы от -50 до 200° С; ТСПУ на пределы от -200 до 500° С.
Термометры сопротивления по сравнению с манометрическими термометрами обладают рядом преимуществ: более высокой точностью измерения, возможностью передачи показаний на большие расстояния, возможностью централизации контроля температуры путём присоединения нескольких термометров к одному многоточечному прибору, меньшим запаздыванием в показаниях.
Недостаток термометров сопротивления – необходимость в постороннем источнике тока.
В качестве измерительных (вторичных) приборов термометров сопротивления применяются уравновешенные мосты и логометры.
Термометры сопротивления, основанные на изменении электрического сопротивления проводников и полупроводников при изменении их температуры.
2. Логические элементы: и, или, не.
Основными составляющими частями всех цифровых устройств явл-ся логические элементы. Логический элемент—система, которая основываясь на выходных сигналах решает, что ей ответить на выходе «да» или «нет». Логич. элементы могут быть собраны на переключателе, реле, диодах, транзисторах, на интегральных схемах.
Логический элемент И (вентиль) («все или ничего»)


Таблица
истинности устанавл. жесткую связь
между входами выходами. Замкнутое
состояние ключа соответствует логической
единице, разомкнутое— логическому
нулю. Особенностью логич. элемента И
явл. то, что входной сигнал А связан
логич. функцией И с входным сигналом В,
в результат на выходе появл. сигнал У.
Сокращенная запись данного выраж. наз.
Булевым
выражением:
А =У
=У
 Таблица
истинности, булево выражение и
условно-графич. изображение- это
инструменты, кот. используются при
создании цифровых устройств.
Таблица
истинности, булево выражение и
условно-графич. изображение- это
инструменты, кот. используются при
создании цифровых устройств.
Логический элемент ИЛИ (что-нибудь или все)



Особенностью логич. эл-та ИЛИ явл-ся то, что на его выходе появл. сигнал низкого логич. уровня в том случае, если на оба входа также поданы сигналы низкого логич. уровня. Булево выражение: Y=А+В
Логический элемент НЕ (инвертор)



А=Ā Черточка над А обозначает, что сигнал инвертирован и читается «не А»
Логич. эл-ты И, ИЛИ, НЕ являются основными составляющими частями любых цифровых устройств. В промышленности выпускаются 7 элементов логич. схем. Наиб. широко представлена схема И-НЕ, что связано с ее универсальным характером
3.В дифференциально-трансформаторных передающих преобразователях и основанной на их использовании системе дистанционной передачи унифицированным сигналом измерительной информации является значение взаимной индукции между обмотками электрических катушек (пределы изменения взаимной индуктивности , 0—10 мГн). Дифференциально-трансформаторный преобразователь представляет собой две катушки первичная и вторичную, состоящие каждая из двух секций. Первичная катушка состоит из двух секций, включенных между собой согласно, т. е. выход одной включен на вход другой, а во вторичной катушке выход первой секции 1подключен к выходу второй секции 2. Внутри катушек под действием преобразуемой величины перемещаетсясердечник4.
Взаимная индуктивность системы в зависимости от положениясердечника выразится формулой
Величина и фаза выходного сигнала Е(ЭДС) зависят от положения сердечника в катушке преобразователя по отношению к нейтрале О—О.
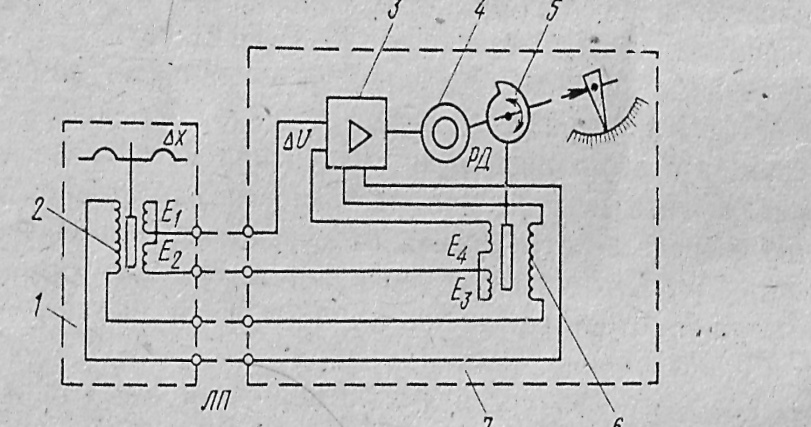
Принципиальная электрическая схема дифференциально-трансформаторной системы дистанционной передачи
Вторичные обмотки включены встречно и подключены ко входу электронного усилителя.
'Когда сердечник трансформатора 2 находится в среднем (нейтральном) положении, ЭДС, индуцируемые во вторичных обмотках E1 и Е2, равны и направлены навстречу. Это положение характеризуется равенством

Если сердечник трансформатора 6 тоже находится в среднем положении, разность ЭДС во вторичных обмотках этой катушки Е3 и Е4 также равна нулю:
U2 = Е3- Е4 = 0. •
Из равенства следует, что при одинаковых параметрах катушек напряжение на входе в усилитель равно нулю и система находится в покое. В этом случае сигнал разбаланса равен нулю и можно записать:

При
отклонении положения сердечника
трансформатора 2 от нейтрального под
действием изменения измеряемого
параметра изменяется распределение магнитных
потоков во вторичных обмотках.
Следовательно, индуцируемые в них ЭДС
не будут равны, и в цепи возникнет ток,
напряжение которого
изменяется распределение магнитных
потоков во вторичных обмотках.
Следовательно, индуцируемые в них ЭДС
не будут равны, и в цепи возникнет ток,
напряжение которого

Величина
этого напряжения является функцией
перемещения сердечника трансформатора
2, а фаза зависит от направления отклонения
сердечника от среднего положения. Сигнал
разбаланса
 подается
на вход электронного усилителя 3 и после
усиления поступает на обмотку
управления реверсивного электродвигателя
4, который с помощью кулачка 5 перемещает
сердечник трансформатора 6 до тех
пор, пока разность напряжений
снова
не станет равна нулю. Одновременно с.
перемещением сердечника движутся
стрелка отсчетного устройства или перо
пишущего механизма, связанные с
реверсивным электродвигателем. В
результате каждому положению сердечника
трансформатора 2 передающего устройства
соответствует определенное положение
сердечника катушки воспринимающего
устройства.
подается
на вход электронного усилителя 3 и после
усиления поступает на обмотку
управления реверсивного электродвигателя
4, который с помощью кулачка 5 перемещает
сердечник трансформатора 6 до тех
пор, пока разность напряжений
снова
не станет равна нулю. Одновременно с.
перемещением сердечника движутся
стрелка отсчетного устройства или перо
пишущего механизма, связанные с
реверсивным электродвигателем. В
результате каждому положению сердечника
трансформатора 2 передающего устройства
соответствует определенное положение
сердечника катушки воспринимающего
устройства.
Из изложенного следует, что дифференциально-трансформаторный преобразователь является устройством, в котором перемещение сердечника преобразуется во взаимную индуктивность между его первичной и вторичной обмотками. Неравенство взаимных индуктивностей двух преобразователей в системе дистанционной передачи, обусловливает возникновение в ней сигнала разбаланса в виде разности напряжения . Основная погрешность дифференциально-трансформаторной системы при передаче на расстояние до 250 м±0,5—1%, на расстояние до 1 км±2,5%.
4. Релейные (позиционные) АСР имеет в своем составе релейное звено, которое преобразует непрерывную входную величину в дискретную релейную, принимающую только два фиксированных значения: минимально и максимально возможное. Релейные звенья позволяют создавать системы с очень большими коэффициентами усилия. Однако в замкнутом контуре регулирования наличие релейных звеньев приводит к автоколебаниям регулируемой величины с определенными периодами и амплитудой. Системы с позиционными регуляторами являются релейными.
5. Для удовлетворения возросших потребностей промышленности в современных средствах получения, преобразования и передачи информации, а также для хранения и обработки сведений и выработки надлежащих команд управления создана Государственная система промышленных приборов и средств автоматизации.
В основу системы положены следующие принципы:
Оптимизация номенклатуры изделий путем создания параметрических рядов, у которых унифицированы входные и выходные сигналы, параметры питания, конструктивные исполнения и присоединительные размеры;
Создание «ветвей ГСП» по роду используемой вспомогательной энергии (пневматической, электрической, гидравлической);
Широкое использование блочно-модульного принципа построения как сомой системы, так и отдельных ее элементов;
Агрегатированное построение сложных устройств на основе типовых унифицированных блоков и приборов;
Совместимость приборов и средств автоматизации ГСП при работе в автоматических системах контроля, регулирования и управления.
По функциональному признаку (или назначению) изделия ГСП разделяются на следующие группы устройств:
1 - Для получения информации о состоянии процессов;
2 - Для приема, преобразования и передачи информации по каналам связи;
3 - Для преобразования, хранения и обработки информации и формирования команд управления;
4 - Для использования командной информации в целях воздействия на процесс, т.е. исполнительные устройства.По виду энергии, используемой для питания устройств и формирования сигналов, ГСП подразделяются на несколько больших групп, так называемых ветвей: электрическую, пневматическую, гидравлическую, а также ветвь приборов и устройств, работающих без источников вспомогательной В системах автоматизации управления сложными технологическими процессами применяются, как правило одновременно технические устройства и приборы всех ветвей.Создание параметрических рядов, унифицированных систем и агрегатированных комплексов приборов и средств автоматизации значительно сокращает номенклатуру ГСП.Все средства измерений и устройства электрической, пневматической и гидравлической ветвей имеют унифицированные входные и выходные сигналы.
Основные виды унифицированных сигналов ГСП.
Вид сигнала |
Физическая величина |
Параметры сигнала |
Электрический |
Постоянный ток |
0÷5; 0÷20; -5÷0÷5; 4 - 20мА |
Постоянное напряжение |
0÷10; 0÷20; -10÷0÷10мВ; 0÷10; 0÷1; -1÷0÷1 В |
|
Переменное напряжение |
0÷2; -1÷0÷1 В |
|
Частота |
2÷8; 2÷4 кГц |
|
Пневматический |
Давление |
0,02÷0,1МПа(0,2÷1кГс/см2) |
Гидравлический |
Давление |
0,1÷6,4МПа |
6. Уровнемер — прибор, предназначенный для определения уровня содержимого в открытых и закрытых сосудах, резервуарах, хранилищах и других ёмкостях. Под содержимым подразумеваются разнообразные виды жидкостей, в том числе и газообразующие, а также сыпучие и другие материалы. Уровнемеры так же называют датчиками/сигнализаторами уровня, преобразователями уровня. Главное отличие уровнемера от сигнализатора уровня — это возможность измерять градации уровня, а не только его граничные значения.
К наиболее распространённым методам измерения уровня, которые позволяют преобразовать значение уровня в электрическую величину и передавать её значение в системы АСУ ТП относятся:контактные методы:волноводный;поплавковый,ёмкостной,гидростатический,буйковый;
бесконтактные методы:зондирование звуком,зондирование электромагнитным излучением,зондирование радиационным излучением.
По принципу действия уровнемеры для жидкостей разделяются на механические, гидростатические, электрические, акустические, микроволновые и рефлексные. При измерении уровня в сложных условиях (пыль, камни, большой угол откоса сыпучего материала) используются, как правило, лазерные уровнемеры, которые безопасны для глаз и обеспечивают отсутствие ложных отраженных сигналов.
Механические Механические уровнемеры бывают поплавковые, с чувствительным элементом (поплавком), плавающим на поверхности жидкости, и буйковые, действие которых основано на измерении выталкивающей силы, действующей на буёк. Перемещение поплавка или буйка через механические связи или систему дистанционной (электрической или пневматической) передачи сообщается измерительной системе прибора. Измерение уровня гидростатическими уровнемерами основано на уравновешивании давления столба жидкости в резервуаре давлением столба жидкости, заполняющей измерительный прибор, или реакцией пружинного механизма прибора.
Поплавковые Уровнемер поплавковый предназначен для выдачи электрического дискретного сигнала об уровне жидкости и уровне раздела двух несмешивающихся жидкостей в аппаратах и резервуарах технологических установок. В поплавковых уровнемерах имеется плавающий на поверхности жидкости поплавок, в результате чего измеряемый уровень преобразуется в перемещение поплавка. В таких приборах используется легкий поплавок, изготовленный из коррозионно-стойкого материала. Показывающее устройство прибора соединено с поплавком тросом или с помощью рычагов. Поплавковыми уровнемерами можно измерять уровень жидкости в открытых емкостях.
Буйковые В буйковых уровнемерах применяется неподвижный погруженный в жидкость буек. Принцип действия буйковых уровнемеров основан на том, что на погруженный буек действует со стороны жидкости выталкивающая сила. По закону Архимеда эта сила равна весу жидкости, вытесненной буйком. Количество вытесненной жидкости зависит от глубины погружения буйка, то есть от уровня в емкости.Принцип действия буйковых уровнемеров позволяет в широких пределах изменять их диапазон измерения. Это достигается как заменой буйка, так и изменением передаточного отношения рычажного механизма промежуточного преобразователя.
Гидростатические Гидростатический способ измерения уровня основан на том, что в жидкости существует гидростатическое давление, пропорциональное глубине, то есть расстоянию от поверхности жидкости. В качестве таких приборов обычно применяют дифференциальные манометры.
Электрические Принцип действия электрических уровнемеров основан на различии электрических свойств жидкостей и газов. При этом жидкости, уровень которых измеряется, могут быть как проводниками, так и диэлектрика¬ми; газы же, находящиеся в нежидкостном пространстве, всегда диэлек¬трики. Основным параметром, определяющим электрические свойства проводников, является их электропроводность, а диэлектриков - относительная диэлектрическая проницаемость, показывающая, во сколько раз по сравнению с вакуумом уменьшается в данном веществе сила взаимодействия между электрическими зарядами. В зависимости от того, какой выходной параметр (сопротивление, емкость или индуктивность) первичного преобразователя «реагирует» на изменение уровня, электрические уровнемеры подразделяются на такие виды: кондуктометрические, емкостные и вибрационные.
Ёмкостные. Принцип действия уровнемера емкостного следующий: при заполнении или опорожнении резервуара электрическая емкость расположенного в уровнемере чувствительного элемента изменяется пропорционально уровню погружения в контролируемую среду. Это изменение емкости преобразуется электронной схемой в сигнал постоянного тока, который затем используется для местных показаний, для двух установок сигнализации и для передачи на другие устройства.
Кондуктометрические Действие кондуктометрического уровнемера основано на измерении сопротивления между электродами, помещенными в измеряемую среду Кондуктометрические уровнемеры (уровнемеры сопротивления) применяются для измерения уровня проводящих жидкостей (в том чис¬ле, и жидких металлов). Основные факторы, ограничивающие точность кондуктометрических уровнемеров — непостоянство площадей поперечных сечений электродов и вследствие этого непостоянство удельных сопротивлений по длине электродов, а также образование на электродах пленки (окисла или соли) с высоким удельным сопротивлением, что приводит к резкому неконтролируемому снижению чувствительности датчика.
Вибрационные Вибрационные сигнализаторы уровня применяются для измерения граничных значений жидкостей. Модульная конструкция приборов позволяет использовать их в емкостях, резервуарах и трубопроводах
Акустические (ультразвуковые) В акустических, или ультразвуковых, уровнемерах используется явление отражения ультразвуковых колебаний от плоскости раздела сред жидкость-газ. Действие уровнемеров этого типа основано на измерении времени прохождения импульса ультразвука от излучателя до поверхности жидкости и обратно
Микроволновые радарные Радарные уровнемеры, подобно акустическим уровнемерам, используют явление отражения электромагнитных колебаний от плоскости раздела сред жидкость-газ. Радарные датчики уровня не имеют контакта с измеряемым объектом. Это позволяет использовать их в сложных условия, в частности, при высоком давлении, высоких температурах, при нахождении паров и газов над поверхностью. По сравнению с ультразвуковыми уровнемерами, радарные способны обеспечить большую точность измерения, обладают меньшей зоной нечувствительности, способны работать при больших давлениях в резервуаре.
Рефлексные (волноводные) Рефлексные уровнемеры предназначены для измерения уровня, дистанции и объема жидкостей, паст и сыпучих продуктов, а также раздела фаз жидких продуктов.
7.Расходомеры переменного перепада давления. Принцип действия этой группы расходомеров основан на зависимости перепада давления, создаваемого неподвижным устройством, устанавливаемым в трубопроводе, или элементом трубопровода, от расхода вещества.
К расходомерам переменного перепада давления относятся расходомеры:
С сужающим устройством (принцип действия основан на зависимости перепада давления, образующегося в сужающем устройстве в результате частичного перехода потенциальной энергии перехода в кинетическую, от расхода);
С гидравлическим сопротивлением (принцип действия основан на зависимости перепада давления, образующегося на гидравлическом сопротивлении, от расхода);
С напорным устройством (принцип действия основан на зависимости перепада давления, создаваемого напорным устройством в результате перехода кинетической энергии струи в потенциальную от расхода);
Центробежные (принцип действия основан на зависимости давления, образующегося на закруглении трубопровода в результате действия центробежных сил в потоке, от расхода);
Струйные (принцип действия основан на зависимости перепада давления, образующегося при ударе струи от расхода) и др.
Тахометрические расходомеры (принцип действия основан на зависимости скорости движения тела, установленного в трубопроводе, от расхода вещества). В эту группу входят: 1) камерные расходомеры с одним или несколькими подвижными элементами, отмеривающими при своем движении определенные объемы жидкости или газа; к камерным расходомерам относятся шестерные ( с вращающимися шестернями), лопастные (с лопастями, совершающими сложное вращательно-поступательное движение), винтовые (с роторами винтовой формы), кольцевые (с кольцевым поршнем, катящимся внутри цилиндрической камеры и одновременно движущимся вдоль перегородки) и др.; 2) турбинные с вращающейся крыльчаткой; 3) шариковые с движущимся шариком.
8. П-закон регулирования
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U=f(). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора и основные качественные и количественные характеристики систем.
Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микро ЭВМ или микропроцессорных систем).
Простейшим является пропорциональный закон, и регулятор в этом случае называют П-регулятором. При этом U=U0+k, где U0-постоянная величина, k-коэффициент пропорциональности. Основным достоинством П-регулятора является простота. По существу, это есть усилитель постоянного тока с коэффициентом усиления k. Недостатки П-регулятора заключаются в невысокой точности регулирования, особенно для объектов с плохими динамическими свойствами.
Интегральный закон регулирования и соответствующий И-регулятор реализует следующую зависимость:
 ,
где Постоянная времени интегрирования.
,
где Постоянная времени интегрирования.