Тема 4. Кінематичний аналіз механізмів
4.1. Задачі
Визначити закон руху ланок механізму за його кінематичною схемою та законом руху початкової ланки.
Закон руху ланок при різних видах руху визначається рівняннями:
при поступальному русі:
|
(4.1) |
|
|
|
при обертальному русі:
 - кутове
переміщення;
- кутове
переміщення;(4.2)
 - кутова швидкість;
- кутова швидкість; - кутове
прискорення.
- кутове
прискорення.при плоскопаралельному русі:
|
(4.3) |

4.2. Аналоги швидкостей і прискорень
4.2.1. Аналоги швидкостей
Іноді простіше і легше брати похідні не за часом, а за узагальненою координатою, а потім брати похідну за часом від функції узагальненої координати.
Відомо, що швидкість – це перша похідна за часом від радіуса-вектора:
|
(4.4) |
Аналог швидкості:
|
(4.5) |
Аналогічно:
|
(4.6) |
|
|
(4.7) |
|
Аналог швидкості - це перша похідна від радіуса-вектора за узагальненою координатою, яка може бути як кутовою (j), так і лінійною (S).
Встановимо зв'язок між швидкістю та аналогом швидкості:

|
(4.8) |
зв'язок між швидкістю та аналогом швидкості.
Аналогічно:
|
(4.9) |
зв'язок між кутовою швидкістю та аналогом кутової швидкості.
Мають
розмірність:
![]() [м],
[м],
![]() [1].
[1].
4.2.2. Аналоги прискорень
Відомо, що прискорення - це друга похідна за часом від радіуса-вектора.
|
(4.10) |
|
(4.11) |
За аналогією:
|
(4.12) |
|
(4.13) |
Аналог прискорення – це друга похідна від радіуса-вектор за узагальненою координатою.
Встановимо зв'язок між прискоренням та аналогом прискорення:

Отже,
|
(4.14) |
Аналогічно:
|
(4.15) |
Мають
розмірність:
![]() [м];
[м];
![]() [1].
[1].
4.3. Методи кінематичного дослідження механізмів (загальна характеристика)
4.3.1. Графічні
Є найбільш розвинутими. Позитивні якості: наочні, відносно прості. Недоліки: не завжди достатньо точні.
4.3.2. Аналітичні
Є більш сучасними. Позитивні якості: точні. Недоліки: громіздкі та складні без застосування ЕОМ.
4.3.3. Експериментальні
Позитивні якості: найбільш вірогідні. Недолік: велика вартість.
4.4 Плани положень механізму
План положень – це зображення кінематичної схеми механізму, що відповідає певному положенню його початкової ланки.
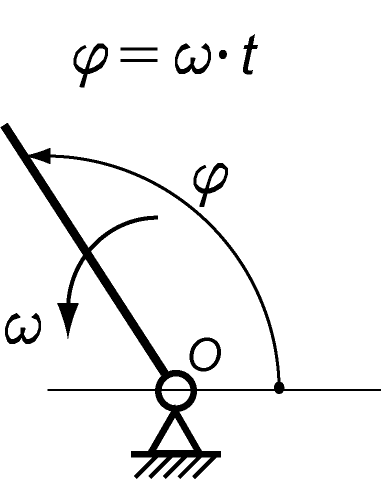
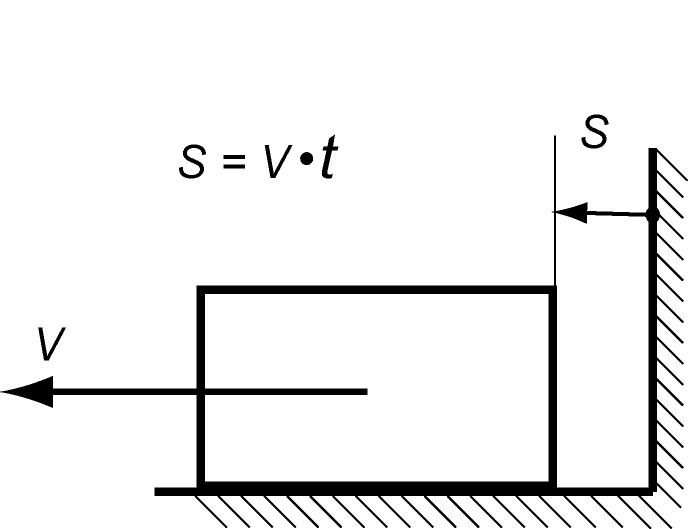
За початкову ланку, зазвичай, приймають кривошип (рис. 4.1) або повзун (рис. 4.2)
Закон руху початкової ланки – функція положення.
Положення решти ланок визначають “методом засічок”, який побудовано на тому положенні ТММ, що всі ланки є абсолютно жорсткими та не змінюють своїх розмірів.
Отже, знаючи траєкторії точок ланок механізму, можна визначити положення будь-якої точки ланки в будь-який момент часу “засічкою”, тобто розхилом циркуля на певну довжину ланки.
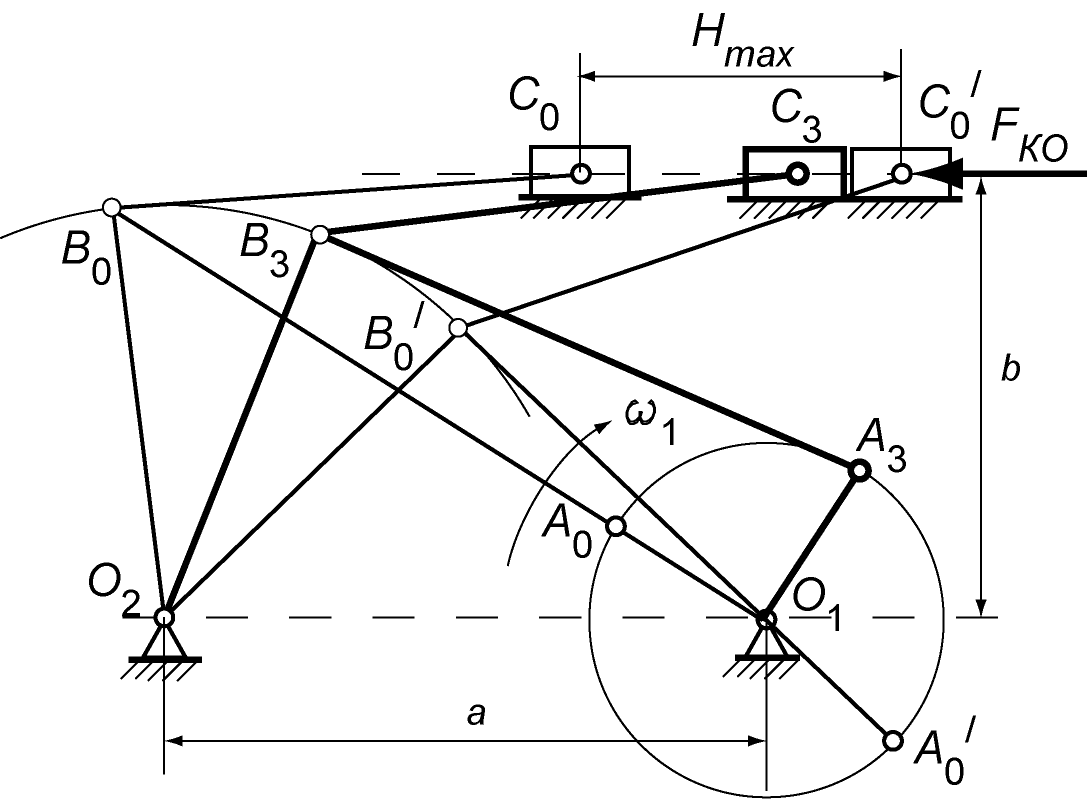
Розглянемо приклад уже вибраного раніше ШВМ завантажника
(рис. 4.3):
Рис. 4.1. Початкова ланка - кривошип |
Рис. 4.2 Початкова ланка – повзун |
|
|
||
Рис. 4.3. Плани положень механізму |
|
|