

Расчет параметров силовой цепи
Сопротивление якорной цепи:
![]()
![]()
Индуктивность якоря двигателя:
![]() ,
,
где
![]() -
номинальное напряжение, ток и скорость
вращения двигателя
-
номинальное напряжение, ток и скорость
вращения двигателя
![]()
![]()
Индуктивность якорной цепи:
![]()
Коэффициент двигателя:
![]()
Выбор сглаживающего дросселя:
Для
расчета сглаживающего дросселя примем
коэффициент использования двигателя
![]() .
.
В этом случае суммарная индуктивность якорной цепи для трехфазной мостовой схемы выпрямления рассчитывается по формуле:
![]()
Т.к.
![]() ,то
сглаживающий дроссель не требуется.
,то
сглаживающий дроссель не требуется.
Расчет статических характеристик
При питании якоря двигателя от тиристорного преобразователя в соответствии с эквивалентной схемой , приведенной на рисунке

Уравнение электромеханической характеристики ЭП имеет вид:

Уравнение механической характеристики:
![]() ,
,
где
![]() - максимальная величина выпрямленной
ЭДС.
- максимальная величина выпрямленной
ЭДС.
![]()
где
![]() -
действующее значение фазной ЭДС вторичной
обмотки трансформатора,
-
действующее значение фазной ЭДС вторичной
обмотки трансформатора,
![]() -
число фаз преобразователя.
-
число фаз преобразователя.
![]()
![]() -падение
напряжения на вентилях, величина которого
не превышает
-падение
напряжения на вентилях, величина которого
не превышает
![]()
![]() В дальнейших расчетах этой величиной
пренебрегаем.
В дальнейших расчетах этой величиной
пренебрегаем.
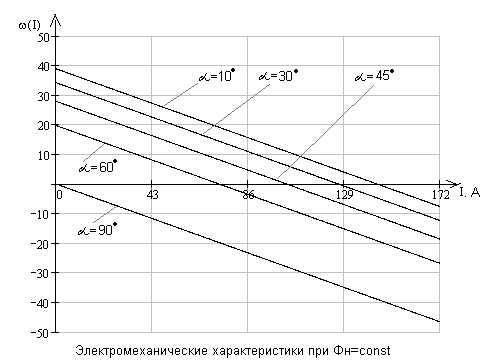
Для построения вышеперечисленных характеристик воспользуемся пакетом для математических расчетов Mathcad:


Электромеханические и механические характеристики при Фн=const, рассчитанные по вышеприведенным формулам, приведены на рисунках .

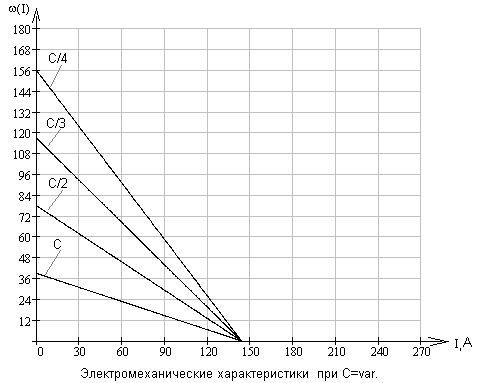
Расчтаем характеристики при ослаблении потока и при номинальном напряжении на двигателе. Согласно техническому условию, с целью регулирования скорости, изменение потока должно производиться в сторону уменьшения в 4 раза.

Характеристики,
расчитанные для
![]() ,
приведены на рис. :
,
приведены на рис. :

Исследование переходных процессов на динамической модели
Для исследования переходных процессов в электроприводе воспользуемся динамической моделью, составленной на основе математического описания элеметнов силовой цепи с использованием пакета Mathlab 6.5-Simulink. Составление модели производилось с учетом режима работы двигателя, состоящего из условий:
Пуск двигателя до номинальной скорости происходит при постоянном потоке.
Режим подрезки торца осуществляется за счет изменения магнитного потока двигателя в диапазоне 1:4.
Для ограничения пусковых токов в схеме модели используются элементы типа Ramp. С помощью которых задается скорость изменеия напряжения на якоре двигателя из условия, чтобы ток в процессе пуска не превышал 2Iн. Для учета инерционности обмотки возбуждения и обеспечения пуска двигателя при номинальном потоке на элементах Ramp задается временная задержка прикладываемого напряжения к якорной цепи на величину 3Tв.
Канал возбуждения в схеме модели реализуется с учетом кривой намагничивания данного двигателя и его номинального потока. Для обеспечения начального потока, равного номинальному Фн, в модели предусмотрено два источника напряжения, суммарное значение которого составляет 220В.
![]() ,
где
,
где
![]()
![]()
![]() обеспечивает выход двигателя на
ослабленный поток. Для режима подрезки
необходимо обеспечить режим постоянно
уменьшающегося значения потока с целью
увеличения скорости при уменьшении
диаметра подрезки детали. Для этого в
схеме модели предусмотрена обратная
связь по скорости, сигнал которой
вычитается из источника задания
напряжения 220В так, чтобы к окончанию
процесса подрезки разность
обеспечивает выход двигателя на
ослабленный поток. Для режима подрезки
необходимо обеспечить режим постоянно
уменьшающегося значения потока с целью
увеличения скорости при уменьшении
диаметра подрезки детали. Для этого в
схеме модели предусмотрена обратная
связь по скорости, сигнал которой
вычитается из источника задания
напряжения 220В так, чтобы к окончанию
процесса подрезки разность
![]() .
Т.к. сигнал обратной связи по скорости
действует непрерывно, поэтому для
обеспечения постоянного потока =Фн
до начала процесса подрезки, в канале
возбуждения предусмотрен элемент,
имеющий характеристику с ограничением,
что позволяет обеспечить постоянство
потока до начала режима резания(рис. )
.
Т.к. сигнал обратной связи по скорости
действует непрерывно, поэтому для
обеспечения постоянного потока =Фн
до начала процесса подрезки, в канале
возбуждения предусмотрен элемент,
имеющий характеристику с ограничением,
что позволяет обеспечить постоянство
потока до начала режима резания(рис. )


Согласно
технологического режима время подрезки
составляет
![]() .
В течение этого времени требуется
производить ослабление потока(отсутствует
установившийся режим). В обратную связь
было введено инерционное звено
.
В течение этого времени требуется
производить ослабление потока(отсутствует
установившийся режим). В обратную связь
было введено инерционное звено
![]()
где
![]() .
Т.к. система является не стационарной(с
переменными коэффициентами), коэффициенты
прямого канала в цепи возбуждения и
цепи обратной связи были подобраны
экспериментальным путем. Схема модели
приведена на рис. .
.
Т.к. система является не стационарной(с
переменными коэффициентами), коэффициенты
прямого канала в цепи возбуждения и
цепи обратной связи были подобраны
экспериментальным путем. Схема модели
приведена на рис. .

Рис.
Графики переходных процессов на рис. .


Рис. : Переходные процессы в цепи якоря и цепи возбуждения за цикл работы двигателя.


Рис. : Переходные процессы в цепи якоря и цепи возбуждения во время пуска двигателя.

Рис. : Переходные процессы в цепи якоря при торможении двигателя.
Проверка предварительно выбранного ЭД.
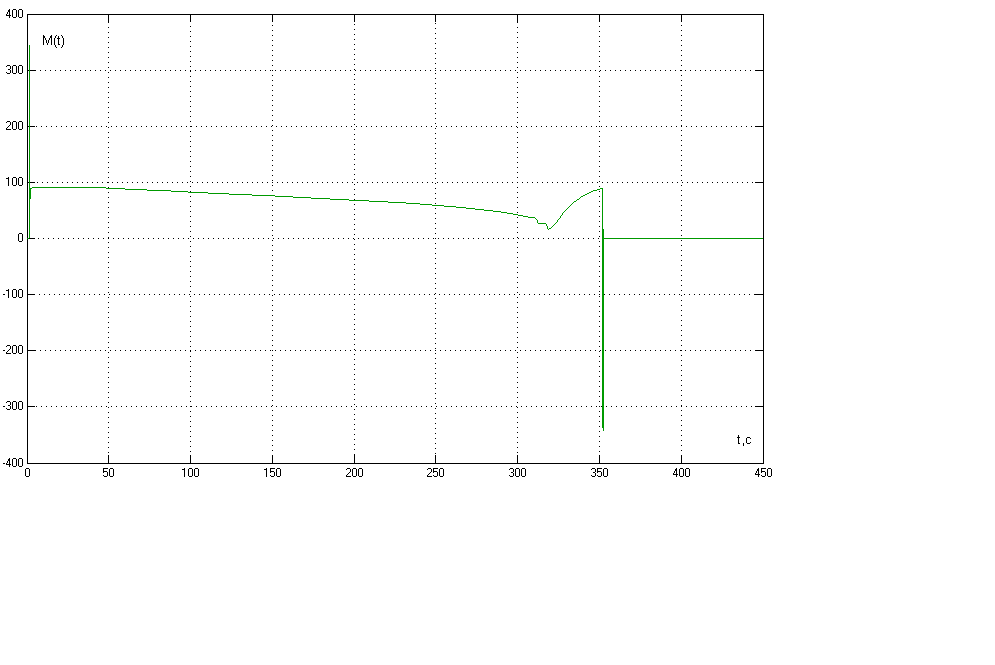
Проверка по перегрузке
Проверка по кратковременной перегрузке
в динамическом режиме выполняется
сравнением Mmax
из диаграммы
![]() с
допустимым моментом ЭД:
с
допустимым моментом ЭД:
Mдоп> Mmax .
Из рис.4 Mmax=90
[![]() ]
]
Допустимый момент ЭД:
![]() [
[![]() ]
]
Условие недопущения перегрузки выполняется.
Проверка по нагреву.
Условием правильного выбора ЭД по нагреву является:
![]() ,
,
где
![]() - развиваемый ЭД момент, эквивалентный
по условиям нагрева дей –
- развиваемый ЭД момент, эквивалентный
по условиям нагрева дей –
ствительному изменяющемуся по времени моменту и определяемый как среднеквадратичный момент ЭД за 1 рабочий цикл (при постоянной тепло - отдаче). В нашем случае воспользуемся мгновенным значением момента от времени. Пренебрегая переходными процессами, рассмотрим значения момента при установившемся режиме работы двигателя.
Условие проверки по нагреву
![]() =100
=100
![]() выполняется.
выполняется.
Предварительно выбранный ЭД удовлетворяет требованиям по перегрузке и по нагреву.
Выводы:
Графики переходных процессов, полученные на модели, соответствуют режиму работы данного станка. Кроме этого на модели удалось получить автоматический режим подрезки, который необходимо иметь в процессе работы станка.
Т.к. в режиме подрезки постоянно происходит изменение момента и скорости, т.е. эти величины являются временными функциями, их зависимости получим на основе динамической модели с использованием графопостроителя.
И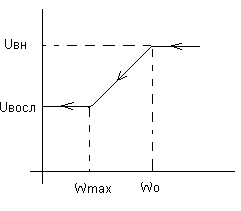 зменение
напряжения на обмотке возбуждения
моделируем из условия:
зменение
напряжения на обмотке возбуждения
моделируем из условия:
При
![]()
![]()
При
![]()
![]()