

5.2.2Судно на воздушной подушке
На рис.4.4 представлено судно на воздушной
подушке (СВП). Подушка создается мощным
вентилятором(1), который осуществляет
наддув воздуха в полость под судном,
огражденную юбкой(3). Ограждение может
быть резиновым, тогда судно может
выходить на берег, или металлическим
(чисто морской вариант). Основными
движителями являются два пропеллера в
насадках, тяги которых регулируются
изменением шага винта
![]() .
Кроме того, имеется аэродинамический
руль направления
.
.
Кроме того, имеется аэродинамический
руль направления
.
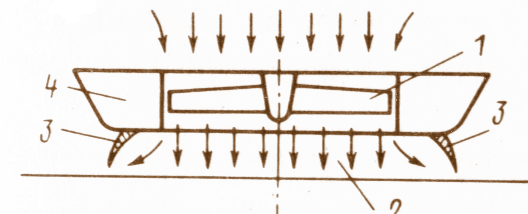
Рис.5.4
Рассматривается боковое движение судна.
На движение существенно сказывается
крен, поскольку при наличии крена
возникают боковые силы от неравномерности
струй, вытекающих из под подушки.
Полагается
![]() ,
,
![]() . Тогда рассматриваем уравнения
. Тогда рассматриваем уравнения
 (5.35)
(5.35)
Введем скоростной аэродинамический
напор
![]() и
гидродинамический напор
и
гидродинамический напор
![]() .
Обозначим
.
Обозначим
![]() -сила
и моменты аэродинамического трения
корпуса относительно соответствующих
осей;
-сила
и моменты аэродинамического трения
корпуса относительно соответствующих
осей;
![]() -
сила и моменты гидродинамического
трения корпуса относительно соответствующих
осей;
-
сила и моменты гидродинамического
трения корпуса относительно соответствующих
осей;
![]() -
сила и моменты аэродинамического руля
относительно соответствующих осей;
-
сила и моменты аэродинамического руля
относительно соответствующих осей;
![]() -
сила и момент, создаваемые подушкой при
крене;
-
сила и момент, создаваемые подушкой при
крене;
![]() -момент
создаваемый движителями при изменении
шага винта(пропеллера).
-момент
создаваемый движителями при изменении
шага винта(пропеллера).
Суммарные силы и моменты

Тогда уравнения бокового движения примут вид:
 (5.36)
(5.36)
В матричной форме эти уравнения имеют вид
 .
(5.37)
.
(5.37)
Система стабилизации курса СВП
Система обеспечивает стабилизацию
курса
![]() ,т.е. рыскание (
,т.е. рыскание (![]() .
.
Структура системы приведена на рис. 5.5
Рис.5.5
![]() -параметры
закона управления.
-параметры
закона управления.
![]() -
передаточная функция СВП от входа
-
передаточная функция СВП от входа
![]() к
выходу
,
к
выходу
,
![]() -
передаточная функция СВП от входа
к
выходу
.
-
передаточная функция СВП от входа
к
выходу
.
Операторные уравнения, соответствующие системе линейных д.у. имеют вид
При
![]() (автоматическая
стабилизация крена за счет подушки),
имеем
(автоматическая
стабилизация крена за счет подушки),
имеем
Эти уравнения аналогичны рассмотренным ранее уравнениям НК. Тогда
![]() (5.38)
(5.38)
Передаточная функция разомкнутой системы
 ,
,
где
![]()
Передаточная функция замкнутой системы
![]() и характеристический полином можно
записать
и характеристический полином можно
записать
,
где
![]() .
.
На основании полученных коэффициентов
![]() можно
провести оценку устойчивости и качества
переходных процессов, как это делалось
в предыдущем примере.
можно
провести оценку устойчивости и качества
переходных процессов, как это делалось
в предыдущем примере.
5.2.3Судно на подводных крыльях
Схема судна на подводных крыльях (СПК) для вертикальной плоскости представлена на рис.5.6
.
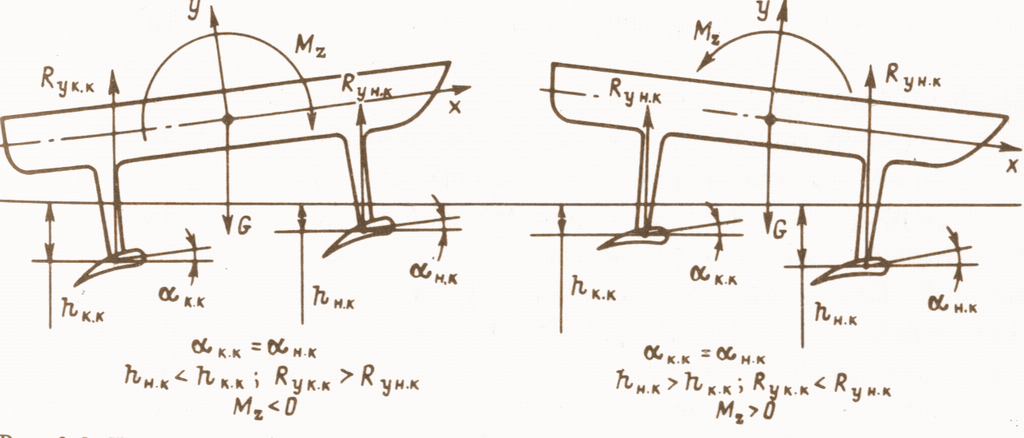
Рис.5.6
Предполагается, что скорость судна
постоянна, стабилизация по дифференту
и глубине погружения крыльев осуществляется
за счет изменения углов атаки крыльев
![]() .
Причем подъемная сила крыла увеличивается
при увеличении глубины его погружения
(автоматическая стабилизация дифферента).
Стабилизация по крену осуществляется
автоматически за счет V-образности
крыльев.
.
Причем подъемная сила крыла увеличивается
при увеличении глубины его погружения
(автоматическая стабилизация дифферента).
Стабилизация по крену осуществляется
автоматически за счет V-образности
крыльев.
Уравнения динамики СПК в вертикальной плоскости имеют вид:
 (5.39)
(5.39)
Управляющие сила и момент имеют вид

После подстановки этих силы и момента в уравнения динамики, получим
 (5.40)
(5.40)
или в векторно-матричной форме
Рассмотрим систему стабилизации СПК по дифференту, рис.5.7
Рис.5.7
Передаточная функция разомкнутой системы имеет вид:
![]() ,
,
замкнутой
![]() ,
,
где
 (5.41)
(5.41)
Получив передаточную функцию замкнутой системы, ее можно исследовать на устойчивость и качество переходных процессов.