

6.6 Качество регулирования сау
Качество работы САУ оценивают по величинам статической и динамической ошибок. По этим характеристикам автоматические системы бывают статические и астатические.
Статическая ошибка - это разность величин регулируемого параметра в исходном и конечном (после окончания регулирования) состояниях равновесия системы.
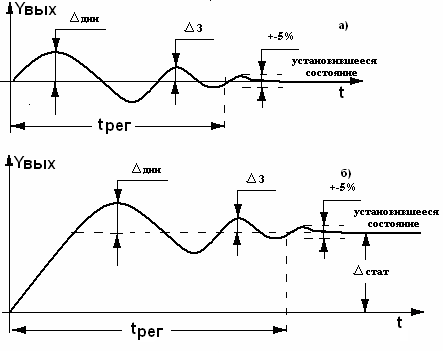
Рисунок 6.17 – График регулирования астатической (а) и статической (б) САУ.
В астатической системе статическая ошибка равна нулю, т.е. система после процесса регулирования возвращается в исходное состояние равновесия. В астатических САУ конечное и исходное равновесие совпадает с заданием. Поэтому в этих САУ динамическая ошибка равна максимальному отклонению параметра в процессе регулирования (рис. 6.17а).
В статической системе в установившемся состоянии - через достаточно долгое время после начала регулирования τ, всегда имеется статическая ошибка регулирования (рис.6.17б).
Динамическая ошибка - это максимальное в процессе регулирования отклонение регулируемого параметра от конечного состояния равновесия
Δдин= (Yвых маx - Yвых ном).
Время регулирования - это отрезок времени Δτ с момента нанесения на замкнутую САУ возмущающего воздействия, по истечении которого отличие регулируемого параметра от конечного состояния равновесия становится равным и меньше ± 5% от заданной величины. Если заданная величина равна нулю, то ± 5% берут от величины динамической ошибки.
Перерегулирование - это динамическая ошибка, отнесённая к номинальной величине регулируемого параметра в процентах. Перерегулирование вычисляют по формуле:
σ = (Yвых маx - Yвых ном)100%/Yвых ном .
Степень затухания - это показатель качества, который характеризует, насколько процентов уменьшается амплитуда колебаний выходного сигнала системы за один период колебаний. Степень затухания Ψ определяется по формуле:
ψ = (Δдин - Δ3)100%/ Δдин ,
где: Δз - амплитуда колебаний третьего периода. Если Δз = 0, то Ψ = 100%.
Обобщённый показатель качества. Для определения величины этого показателя вычисляют интеграл (площадь подынтегральной фигуры) изменения в процессе регулирования выходного сигнала системы за период времени регулирования:
tрег
J = ∫ (Δ)2dt.
0
Δ – амплитуду колебаний берут в квадрате, чтобы просуммировать как положительные, так и отрицательные отклонения выходного сигнала. Естественно, чем меньше динамическая, статическая ошибки и время регулирования, тем меньше величина интеграла J и выше качество работы САУ.
Оптимальные процессы регулирования.
На практике часто требования к качеству работы проектируемой САУ задаются не в виде величины отдельных показателей качества, а в виде требования реализации одного из трёх оптимальных процессов регулирования.
Первый из них - апериодический процесс регулирования показан на рис. 6.18а.
Регулируемый параметр после отклонения плавно возвращается к заданной величине. В этом процессе по сравнению с двумя последующими будет минимально время регулирования, но максимальна динамическая ошибка.
Второй - процесс регулирования с 20% перерегулированием условно дан на рис. 6.18б. В этом процессе по сравнению с апериодическим меньше динамическая ошибка, но больше время регулирования. Для этого процесса перерегулирование не должно превышать 20%.
Третий- процесс регулирования с минимальным интегральным показателем качества (рис. 6.18в). В этом процессе регулирования интегральный показатель качества сведён к минимуму, а из трёх рассмотренных оптимальных процессов регулирования будет минимальная динамическая ошибка, но время регулирования - максимальное.
Выбор оптимального процесса из трёх определяется видом технологического процесса объекта управления. Иногда кратковременная большая динамическая ошибка может быть очень опасна. Например, при управлении давлением пара в котле. Для такого объекта апериодический процесс не самый лучший. В некоторых случаях большое время перерегулирования может быть опасным для проведения операции - например, при выпечке хлеба, значительное повышение температуры в печи не может быть длительным.