

4.2.1. Безынерционное (пропорциональное, усилительное) звено
Типовое уравнение взаимосвязи выходного и входного сигналов этого звена является алгебраическим:
y(t) = ku(t).
где k - постоянный коэффициент.
Передаточная функция:
W(p) = k.
Переходная характеристика:
h(t) = k1(t).
Пропорциональное звено мгновенно (без инерции) реагирует на возмущающее воздействие. Выходной сигнал пропорционален входному сигналу. Ордината выходного сигнала равна коэффициенту пропорциональности k.
В ответ на единичное ступенчатое воздействие сигнал на выходе мгновенно достигает величины в k раз большей, чем на входе, и сохраняет это значение (рис.4.2а.). При k = 1 звено никак себя не проявляет, а при k = - 1 - инвертирует входной сигнал.
Любое реальное звено обладает инерционностью, но с определенной точностью некоторые реальные звенья могут рассматриваться как безынерционные, например, жесткий механический рычаг (рис.4.2.б), редуктор (рис.4.2.в), потенциометр (рис.4.2.г) и т.п.
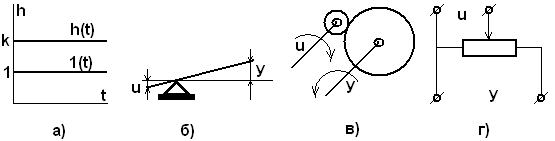
Рисунок 4.2 – Примеры безынерционного (пропорционального,
усилительного) звена.
4.2.2. Интегрирующее (астатическое) звено
Уравнение интегрирующего звена имеет следующий вид:
![]() ,
,
или
![]() ,
,
или py = ku.
Передаточная функция: W(p) = k/p.
Переходная характеристика (рис.4.3.):
![]() .
.
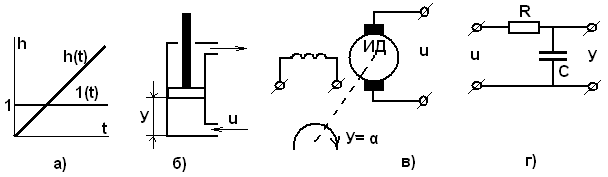
Рисунок 4.3 – Примеры интегрирующих (астатических) звеньев.
При k = 1 звено представляет собой “чистый” интегратор W(p) =1/p. Интегрирующее звено неограниченно "накапливает" входное воздействие. Введение его в САУ превращает систему в астатическую (рис. 4.3а), то есть ликвидирует статическую ошибку. Примерами интегрирующих звеньев могут быть поршневой гидравлический двигатель (рис. 4.3б), электродвигатель (рис.4.3в), электрическая емкость (рис. 4.3г) и т.п. Примером реализации астатического ТДЗ может быть любой накопитель - бак равного по высоте сечения с жидкостью, на выходе которого работает насос с постоянной производительностью (рис. 4.4).
Рисунок 4.4 – Пример реализации астатического звена – бак с жидкостью и выходным насосом.
Объекты, которые аппроксимируют астатическим или интегрирующим звеном, называют астатическими объектами.
4.2.3. Инерционное звено первого порядка (апериодическое)
Уравнение динамики инерционного звена первого порядка:
![]() ,
,
или
Tpy + y = ku.
Это уравнение динамики, называемое иногда кривой разгона, имеет вид экспоненты.
Передаточная функция:
W(p)
=![]() .
.
Переходная характеристика может быть получена с помощью формулы Хевисайда:
 ,
,
где p1 = - 1/T - корень уравнения D(p) = Tp + 1 = 0; D'(p1) = T.
Переходная характеристика имеет вид экспоненты (рис.4.5а), по которой можно определить передаточный коэффициент k, равный установившемуся значению h(ассимтота), и постоянную времени То по времени t, соответствующему точке пересечения касательной к кривой в начале координат с ее асимптотой. При достаточно больших То звено на начальном участке может рассматриваться как интегрирующее, при малых Т звено приближенно можно рассматривать как безынерционное.
Пример апериодического звена - четырехполюсник из сопротивления R и емкости C (рис.4.5б).
Р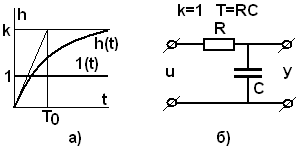 исунок
4.5 – Инерционное звено первого порядка
(апериодическое).
исунок
4.5 – Инерционное звено первого порядка
(апериодическое).
У экспоненты есть свойство: если к любой ее точке провести касательную, а затем точку касания и точку пересечения касательной с асимптотой, к которой с течением времени приближается экспонента, спроецировать на ось времени t, то получают одну и ту же величину времени - «постоянную времени» То, которая характеризует инерционные свойства объекта.
Ордината асимптоты, к которой стремится экспонента, по величине равна коэффициенту k в передаточной функции апериодического звена. Таким образом, по графику кривой разгона можно найти оба коэффициента- k и То в передаточной функции апериодического звена.
Еще одним примером реализации апериодического звена может быть установка - емкость равного по высоте сечения, которая изображена на рис. 4.6. Бак на входе заполняет поток воды с расходом Q1, из бака вытекает свободно поток с расходом Q2.
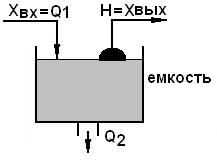
Рисунок 4.6 – Пример реализации апериодического звена при наполнении и истечении емкости с равным расходом.
Регулируемый параметр Хвых - уровень Н в баке. При «единичном скачке» Q1 уровень Н повышается, увеличивается гидростатическое давление, возрастает Q2 и затем уровень Н стабилизируется (экспонента приближается к асимптоте). Эта способность самостоятельно восстанавливать равновесие, присущая объектам, аппроксимируемым апериодическим ТДЗ за счет наполнения или опорожнения энергии или вещества, называется самовыравниванием.
Самовыравнивание количественно определяется коэффициентом самовыравнивания, который равен обратной величине коэффициента k передаточной функции звена:
С= 1/ k.