

15. Основные режимы ввода-вывода.
Основные режимы ввода-вывода.
Для учета особенностей реализации процессов ввода-вывода и специфики различного типа ПУ используются три режима ввода-вывода информации: программный ввод-вывод, ввод-вывод в режиме прерываний и с прямым доступом к памяти.
Интерфейсы должны учитывать возможность реализации всех 3-х режимов ввода-вывода.
Программный ввод-вывод. Здесь инициализация и управление процессом ввода-вывода осуществляет процессор. Существует три способа его выполнения (см. рис.1).
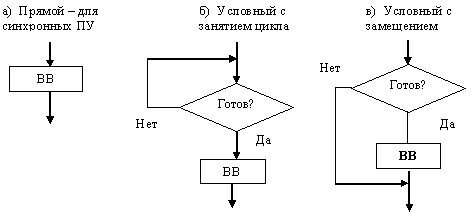
Рис.1. Программный ввод-вывод
Первый способ – прямой, используется для синхронных ПУ, т.е. устройств, которые всегда готовы к работе и циклов ожидания не требуется.
Второй – условный с занятием цикла, когда при не готовности ПУ, процессор ждет до тех пор, пока наступит его готовность.
Третий – условный с совмещением. В отличие от предыдущего, процессор не ждет готовности ПУ, а переходит к продолжению программы с периодической проверкой готовности ПУ.
Ввод-вывод в режиме прерываний. В этом случае инициатором начала процесса ввода-вывода является ПУ. Оно, когда готово, подает сигнал процессору "запрос на прерывание". Процессор, если ПУ разрешен такой режим, завершает текущую команду и переходит к выполнению процесса ввода-вывода (см. рис. 2). Сначала он осуществляет контекстное переключение, т.е. запоминает свое состояние, чтобы можно было после продолжить программу, идентифицирует ПУ и передает управление драйверу данного ПУ (ПП), который и осуществляет ввод или вывод информации. Идентификация ПУ производится с помощью адреса вектора прерывания, который содержит номер ячейки, где хранится первая команда этого драйвера. Адрес вектора прерывания ПУ передается процессору от контроллера прерываний.
16. Интерфейсы внешних устройств ввода-вывода.
Интерфейсы внешних устройств ввода-вывода
Параллельный порт.
Последовательный порт (COM-порт, RS-232).
PS/2.
Инфракрасный порт.
USB (Universal Serial Bus).
Внешние УВВ
Устройства, подключаемые к универсальному внешнему последовательному интерфейсу (RS-232, COM-порт), являются одними из самых медленных в силу ограничения его пропускной способности: 115200 бит/сек. Вследствие своего широкого распространения COM-порты получили поддержку многих ОС. В Windows – это возможность работы с портом средствами Win-32 API, а, например, в Real-time Linux функции управления портом входят даже в состав ядра ОС. Параллельный порт, изначально предназначенный для принтеров, используется для подключения внешних УВВ достаточно редко. Однако, работа в режимах порта EPP и ECP позволяет взаимодействовать с внешними устройствами со скоростью до 2 Мбайт/с, используя при этом ПДП. Последовательный и параллельный порты могут сами представлять собой устройства цифрового ввода-вывода. COM-порт имеет три программно-управляемых выходных линии и четыре программно-читаемых входных линии с уровнем логической единицы в диапазоне от –12 до –3 В и уровнем логического нуля в диапазоне от +3 до +12 В. Параллельный порт содержит гораздо больше выходных и входных цифровых линий (сколько и какие именно – зависит от режима работы порта) с логическими уровнями ТТЛ. Первоначально последовательный и параллельный порты подключались к компьютеру по ISA-шине расширения. Современные компьютеры используют для этих портов и некоторых других интерфейсов специальный, более удобный для этих целей, интерфейс LPC (Low Pin Count, Малое Количество Контактов).
То есть LPC пришел на смену устаревшей ISA. Шина LPC имеет 4 – битный интерфейс, который поддерживает работу внешних портов (COM, LPT, PS/2 и инфракрасного) а также контроллера флоппи дисковода.