

Принцип Даламбера и метод кинетостатики
1. Основные понятия и определения
Принцип Даламбера: Для несвободной движущейся механической системы в любой момент времени геометрическая сумма главных векторов внешних сил, сил реакций связей и сил инерции, а также геометрическая сумма главных моментов этих сил относительно неподвижного центра равны нулю.
1.1. Силы инерции. Определение сил инерции в различных случаях движения твердого тела
Для несвободной механической системы главные вектор и момент сил инерции определяются из основных теорем динамики системы и являются основой для приведения сил инерции, приложенных к твердому телу, к простейшему виду. Простейший вид зависит от вида движения твердого тела.
1. Поступательное движение твердого тела.
В этом случае силы
инерции приводятся к равнодействующей
![]() ,
приложенной в центре масс тела.
,
приложенной в центре масс тела.
|
(1.1) |
где
М – масса тела,
![]() -
ускорение центра масс тела. Знак « – »
означает, что сила
-
ускорение центра масс тела. Знак « – »
означает, что сила
![]() направлена в сторону, противоположную
ускорению
направлена в сторону, противоположную
ускорению
![]() .
.
2. Вращение тела вокруг неподвижной оси, проходящей через центр масс тела.
Если тело вращается вокруг главной центральной оси инерции (например ось Z), то силы инерции приводятся к паре сил инерции,
|
(1.2) |
где
![]() -
осевой момент инерции тела,
-
осевой момент инерции тела,
![]() -
угловое ускорение. Знак «– » показывает,
что пара
-
угловое ускорение. Знак «– » показывает,
что пара
![]() направлена
против направления
направлена
против направления
![]() .
.
3. Плоское движение тела.
При плоском движении силы инерции приводятся к силе инерции приложенной в центре масс тела, и паре сил инерции относительно оси, перпендикулярной плоскости движения и проходящей церез центр масс
|
(1.3) |
где
![]() -
осевой момент инерции относительно оси
-
осевой момент инерции относительно оси
![]() ,
перпендикулярной плоскости движения
и проходящей через центр масс тела,
-
угловое ускорение тела вокруг этой оси.
Знак « – » показывает, что
,
перпендикулярной плоскости движения
и проходящей через центр масс тела,
-
угловое ускорение тела вокруг этой оси.
Знак « – » показывает, что
![]() и
и
![]() направлены
в стороны, противоположные
направлены
в стороны, противоположные
![]() и
соответственно.
и
соответственно.
1.2. Метод кинетостатики
Методом кинетостатики называется искусственный прием, позволяющий записать уравнения движения в виде уравнений статики, основанный на принципе Даламбера.
Если система состоит из нескольких тел, то к каждому телу, помимо активных сил и сил реакций связей, прикладываются соответствующие силы инерции, после чего составляются уравнения равновесия.
При решении задач методом кинетостатики рекомендуется следующая последовательность действий:
1) Выбрать систему, «движение» которой рассматривается, определить вид движения каждого из тел системы;
2) Выбрать систему координат;
3) Составить уравнения равновесия для каждого из тел системы, предварительно расчленив систему по внутренним связям на отдельные тела, где это необходимо;
4) Решить уравнения равновесия и исследовать ответ.
Расчленять систему целесообразно, если она состоит из нескольких тел, и когда вычисление сил инерции вызывает затруднения.
1.3. Пример решения задачи
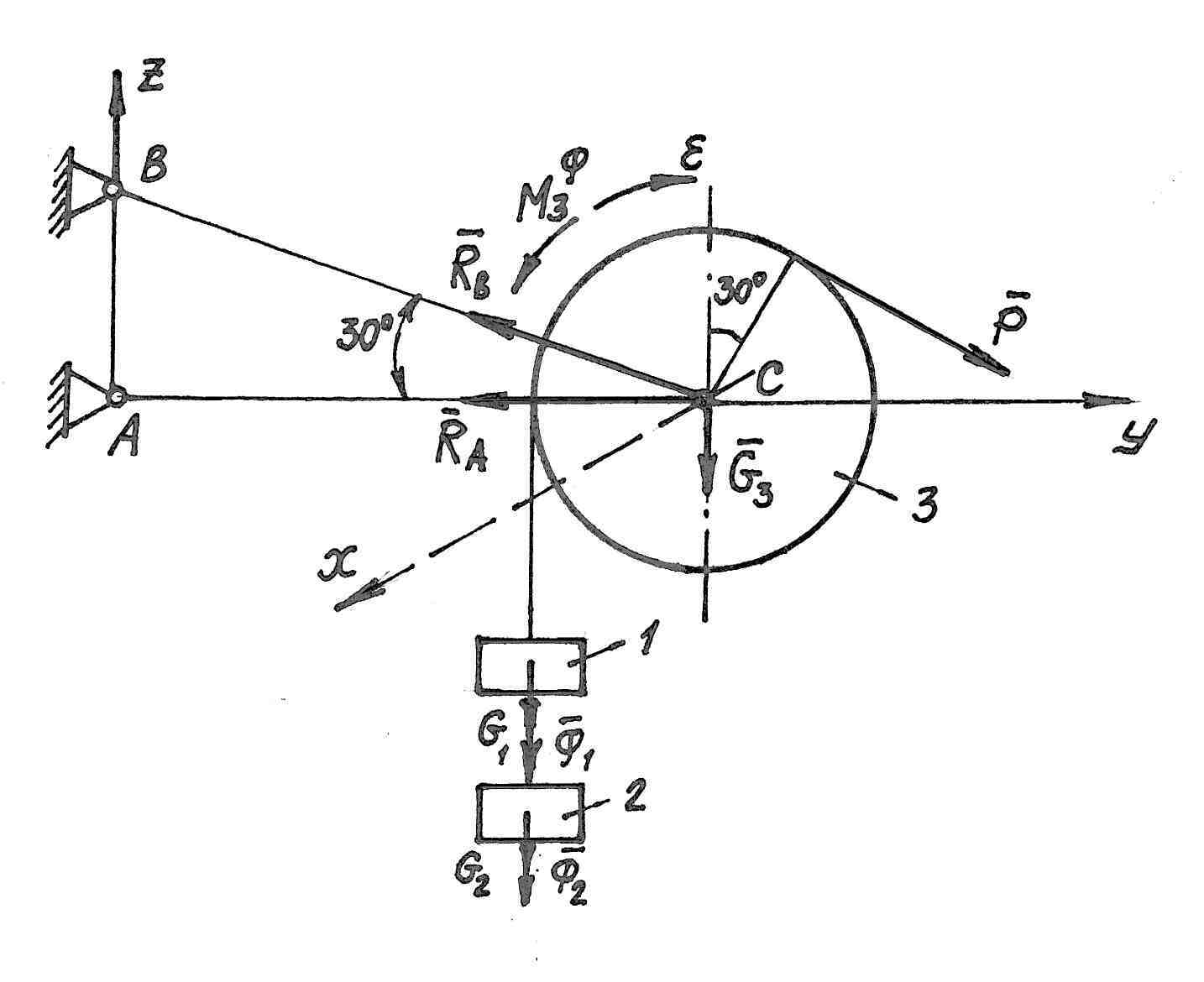
Однородный барабан массы М3 и радиуса R присоединен шарнирно двумя ненагруженными стержнями АС и ВС к стене. На барабан намотана невесомая нерастяжимая нить, к одному концу которой присоединены два груза, массами М1 и М2 соответственно, соединенные нитью, а на другой конец действует постоянная сила Р. Найти усилия в стержных АС и ВС.
Рассмотрим систему
тел 1, 2 и 3. Тела 1 и 2 совершают поступательное
движение, тело 3 вращается вокруг оси
![]() ,
проходящей через точку С.
,
проходящей через точку С.
Выберем систему
координат
![]()
Активными силами
будут:
![]() .
Реакции связей
.
Реакции связей
![]() и
и
![]() направлены вдоль стержней, которые
считаем растянутыми.
направлены вдоль стержней, которые
считаем растянутыми.
Приложим
соответствующие силы инерции
![]()
![]() и
и
![]() .
При этом считаем, что тело 3 вращается
в сторону, определяемую направлением
силы
.
При этом считаем, что тело 3 вращается
в сторону, определяемую направлением
силы
![]() .
.
Составим уравнения равновесия
|
|
|
(1.4) |
Решая эту систему, получим
|
(1.5) |
|
(1.6) |
Для отыскания
значений сил инерции
![]() и
и
![]() ,
составим уравнение моментов относительно
точки
,
составим уравнение моментов относительно
точки
![]() и
приравняем его нулю.
и
приравняем его нулю.
|
|
|
(1.7) |
Из кинематики известно, что
|
(1.8) |
откуда, после дифференцирования, получаем
|
(1.9) |
Подставим (1.9) в (1.7), получим
|
(1.10) |
Из (1.10) находим
|
(1.11) |
Находим соответствующие силы инерции
|
(1.12) |
Подставляя значения и в (1.5) и (1.6) определим значения реакций связей:
|
|
|
|
|
|


Оценивая полученные значения, можно предположить, что стержень ВС растянут, а стержень АС – сжат.