

3. Общее уравнение динамики движения механической системы
При движении материальной системы, подчиненной идеальным удерживающим связям, сумма работ активных сил и сил инерции на любых возможных перемещениях точек системы равна нулю:
|
(3.1) |
если
|
(3.2) |
то общее уравнение динамики имеет вид:
|
(3.3) |
Преимущество общего уравнения динамики по сравнению с другими теоремами динамики заключается в том, что в его формулировке отсутствуют реакции идеальных связей. Если не все связи являются идеальными, например, имеются связи с трением, то, применяя общее уравнение динамики, следует к активным силам добавлять реакции, соответствующие неидеальным связям.
Вычисление суммы работ сил инерции на возможных перемещениях точек твердого тела производится по формулам:
а) При поступательном движении:
|
(3.4) |
где
![]() -
равнодействующая сил инерции (
-
равнодействующая сил инерции (![]() );
);
![]() -
ускорение любой точки твердого тела;
-
ускорение любой точки твердого тела;
![]() -
возможное перемещение любой точки
твердого тела.
-
возможное перемещение любой точки
твердого тела.
б) При вращении вокруг неподвижной оси:
|
(3.5) |
где
![]() -
главный момент сил инерции относительно
оси вращения
-
главный момент сил инерции относительно
оси вращения
![]() ;
;
![]() -
момент инерции твердого тела относительно
оси вращения;
- угловое ускорение вращательного
движения твердого тела;
-
момент инерции твердого тела относительно
оси вращения;
- угловое ускорение вращательного
движения твердого тела;
![]() -
возможное угловое перемещение твердого
тела.
-
возможное угловое перемещение твердого
тела.
в) При плоском движении:
|
(3.6) |
где
![]() -
главный вектор сил инерции
-
главный вектор сил инерции
![]() ;
;
![]() -
ускорение центра масс твердого тела;
-
ускорение центра масс твердого тела;
![]() -
главный момент сил инерции относительно
оси, проходящей через центр масс С
твердого тела перпендикулярно плоскости
движения
-
главный момент сил инерции относительно
оси, проходящей через центр масс С
твердого тела перпендикулярно плоскости
движения
![]() ;
;
![]() -
момент инерции твердого тела относительно
оси, проходящей через центр масс С
перпендикулярно плоскости движения;
-
угловое ускорение твердого тела;
-
момент инерции твердого тела относительно
оси, проходящей через центр масс С
перпендикулярно плоскости движения;
-
угловое ускорение твердого тела;
![]() -
возможное перемещение центра масс С
твердого тела;
-
возможное перемещение центра масс С
твердого тела;
![]() -
возможное угловое перемещение твердого
тела.
-
возможное угловое перемещение твердого
тела.
При решении задач с помощью общего уравнения динамики рекомендуется следующая последовательность действий:
1) Изобразить на рисунке активные и реакции, соответствующие неидеальным связям (силы трения);
2) Определить главные векторы и главные моменты сил инерции масс системы;
3) Дать возможное перемещение одной из точек системы и выразить возможные перемещения точек приложения всех сил, указанных в 1, 2, через это возможное перемещение.
4) Вычислить сумму работ всех сил на возможных перемещениях точек системы; составить общее уравнение динамики, приравняв в вычисленную сумму работ сил нулю;
5) Определить искомую величину либо провести интегрирование дифференциального уравнения движения.
3.1. Пример решения задачи.
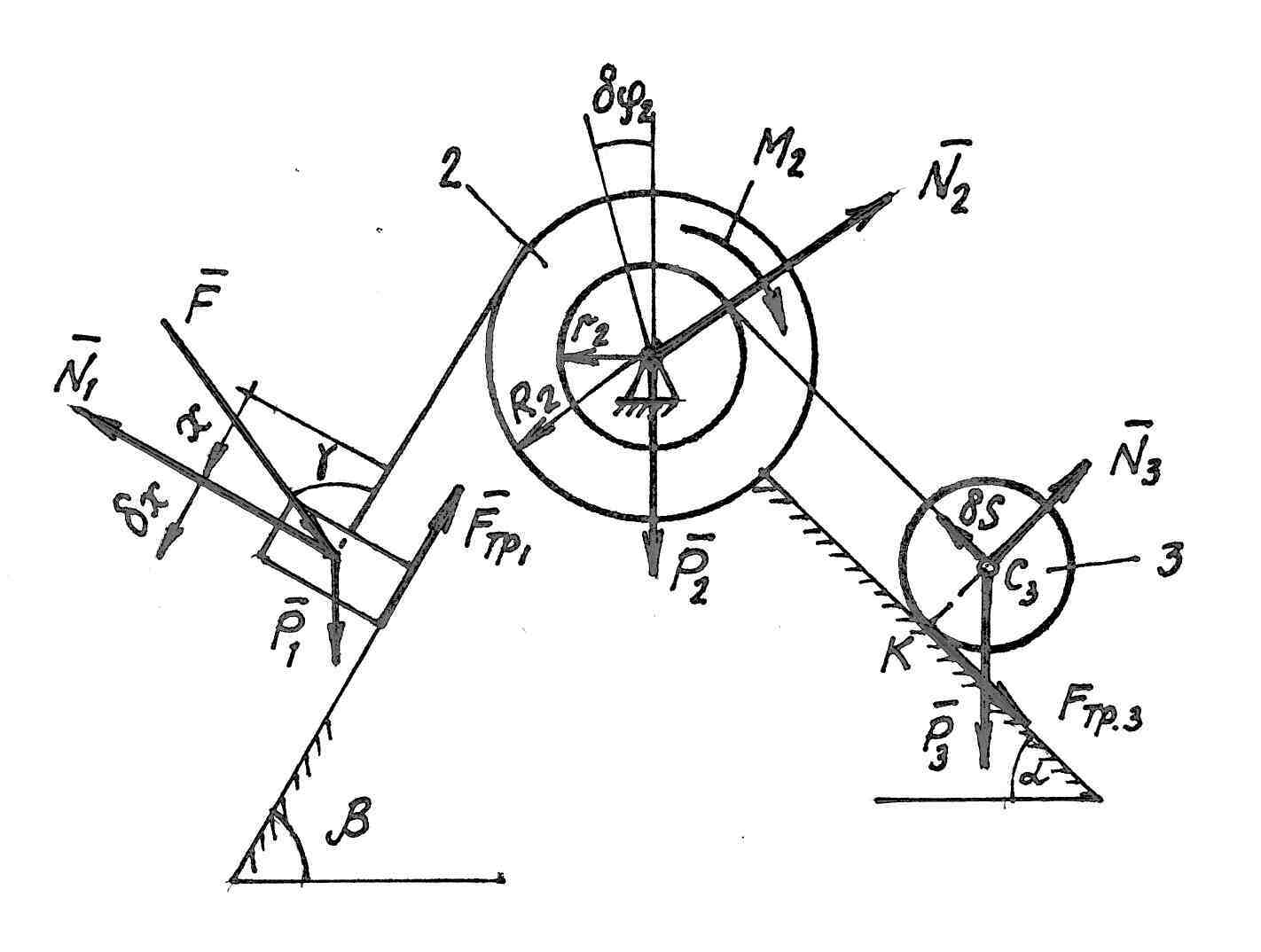
Рис.2.1.
Механическая
система состоит из ступенчатого шкива
2 (радиусы ступеней R2
и r2),
груза 1 и сплошного катка 3, прикрепленных
к концам нитей, намотанных на ступени
шкива. На шкив при его вращении действует
момент сил сопротивления M2
Радиус инерции ступенчатого шкива 2
![]() ρz2,
f
– коэффициент трения скольжения груза
1 о наклонную плоскость.
ρz2,
f
– коэффициент трения скольжения груза
1 о наклонную плоскость.
Дано: R2 = R, r2 = 0,6 R, Р1 = 6Р, Р3 = 3Р, М2 = 0,2 РR, F = 2P, Pz2 = 0,5R, f = 0,1, α = 30˚, β = 60˚, γ = 60˚.
Определить: а1 – ускорение груза 1.
1. Материальная
система состоит из трех твердых тел и
имеет одну степень свободы. Будем
считать, что ускорение груза 1
![]() направлено вниз по наклонной плоскости
.
направлено вниз по наклонной плоскости
.
2. Определим вид движений тел, входящих в систему. Груз 1 совершает поступательное движение; шкив 2 совершает вращательное движение вокруг неподвижной оси; каток 3 – совершает плоское движение.
3. Изобразим на
рисунке активные силы
![]() и
реакции, соответствующие неидеальным
связям
и
реакции, соответствующие неидеальным
связям
![]() .
.
4. Определим главные вектора и главные моменты сил инерции масс системы и изобразим их на рисунке.
|
(3.7) |
|
(3.8) |
5. Дадим возможное
перемещение центру масс груза 1 -
![]() и выразим возможные перемещения точек
приложения всех сил, указанных в пунктах
3 и 4, через это возможное перемещение.
и выразим возможные перемещения точек
приложения всех сил, указанных в пунктах
3 и 4, через это возможное перемещение.
|
(3.9) |
6. Вычислим сумму работ всех сил, указанных в пунктах 3 и 4, на возможных перемещениях точек системы и составим общее уравнение динамики, приравняв вычисленную сумму работ сил нулю.
|
(3.10) |
|
(3.11) |
После сокращения на заданное возможное перемещение получаем:
|
(3.12) |
Так как
|
(3.13) |
то
|
(3.14) |
Сила трения
скольжения
![]()
Силу нормальной
реакции
![]() найдем из условия равенства нулю проекций
на ось, перпендикулярную направлению
движения груза 1 всех сил, действующих
на него
найдем из условия равенства нулю проекций
на ось, перпендикулярную направлению
движения груза 1 всех сил, действующих
на него
|
(3.15) |
Момент инерции шкива 2, поскольку известен его радиус инерции, а каток 3 – сплошной
|
(3.16) |
Окончательно ускорение груза 1 равно
