

2.1. Пример решения задачи.
Плоский механизм
с идеальными связями находится в
равновесии под действием сил
![]() ,
,
![]() и
пары сил с моментом
и
пары сил с моментом
![]() ,
приложенной к звену ОА. Используя принцип
возможных перемещений, определить
величину момента при следующих исходных
данных:
,
приложенной к звену ОА. Используя принцип
возможных перемещений, определить
величину момента при следующих исходных
данных:
![]() Звено АВС – прямоугольный треугольник
с углом при вращении А, равным
Звено АВС – прямоугольный треугольник
с углом при вращении А, равным
![]() .
.
Для решения задачи воспользуемся ПВП, согласно которому
|
(2.3) |
где
![]() -
элементарные работы активных сил на
соответствующих возможных перемещениях.
-
элементарные работы активных сил на
соответствующих возможных перемещениях.
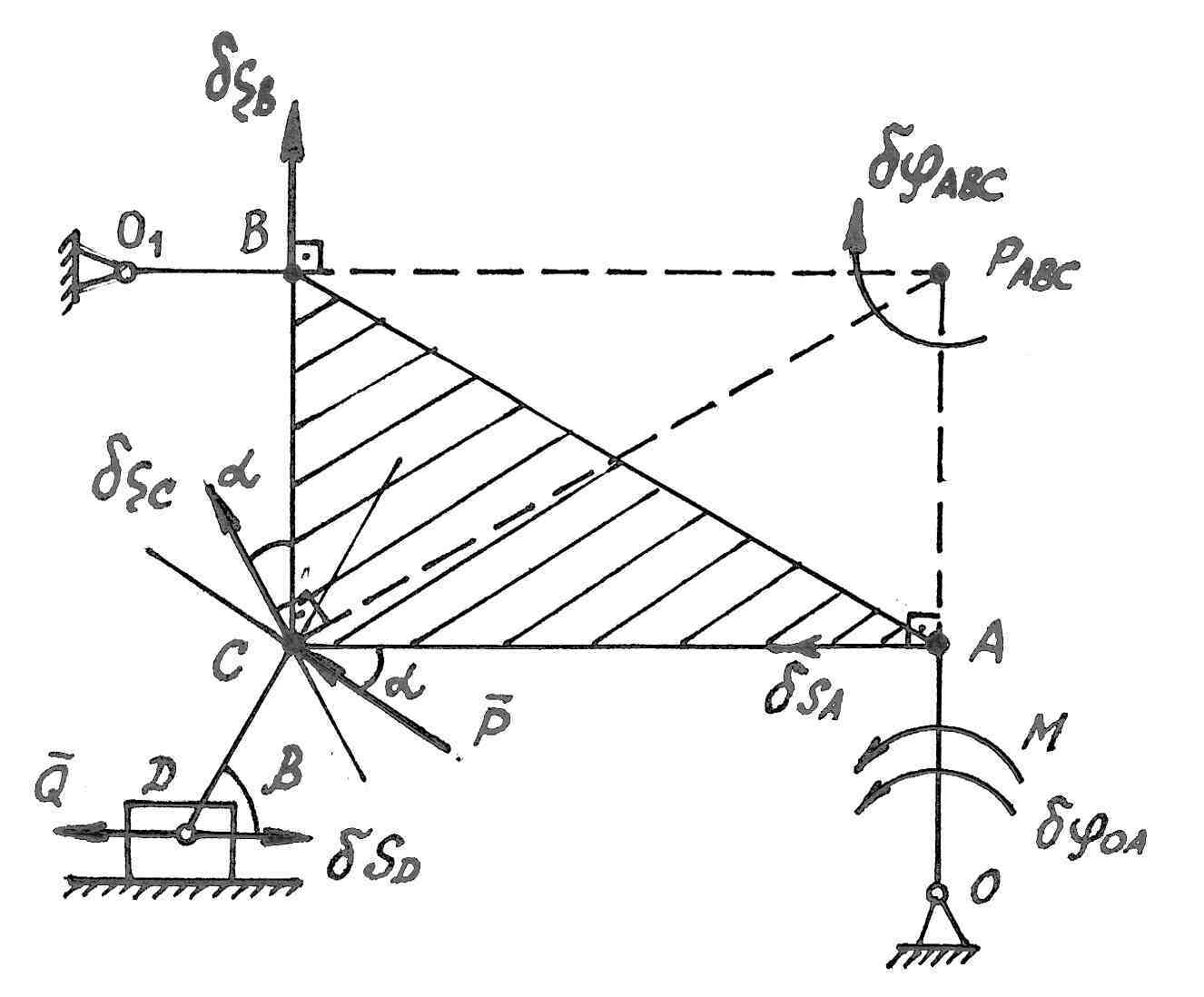
Рассматриваемый механизм имеет одну степень свободы. Его элементы (звенья) совершают следующие виды движений: кривошип ОА и О1В – вращательное движение относительно осей, проходящих через точки О и О1, треугольник АВС и шатун D – поступательное.
Чтобы составить
уравнение (2.3), сообщим механизму возможное
перемещение и введем следующие обозначения
для перемещений звеньев, к которым
приложены активные силы:
![]() -
угловое перемещение звена ОА,
-
угловое перемещение звена ОА,
![]() и
и
![]() -
линейные перемещения точек C
и D.
-
линейные перемещения точек C
и D.
Примем за независимое возможное перемещение и установим кинематические зависимости между указанными возможными перемещениями. Способ их нахождения аналогичен определению скоростей точек при плоском движении.
Сначала найдем возможное перемещение общей для звеньев ОА и АВС точки А. При вращательном движении звена ОА относительно точки О имеем
|
(2.4) |
Направление
![]() определяются направлением
.
определяются направлением
.
Для определения
возможного перемещения точки С находим
мгновенный центр вращения звена АВС,
зная линии действия перемещений двух
точек А и В этого звена -
и
![]() .
Проводя перпендикуляры к направлениям
и
,
получим точку их перемещения -
.
Проводя перпендикуляры к направлениям
и
,
получим точку их перемещения -
![]() .
При плоско-параллельном движении все
точки звена АВС совершают вращательное
движение относительно этой точки.
.
При плоско-параллельном движении все
точки звена АВС совершают вращательное
движение относительно этой точки.
Тогда линейные возможные перемещения точек А, В и С будут пропорциональны их расстояниям до мгновенного центра вращения:
|
(2.5) |
Находим угловое перемещение звена АВС:
|
(2.6) |
его направление определяется направлением (рис. ).
Далее находим и изображаем линейное перемещение точки С
|
(2.7) |

где
![]() .
.
![]() Направление
Направление
![]() определяется
направлением
определяется
направлением
![]() (вращение вокруг точки
происходит против хода часовой стрелки).
(вращение вокруг точки
происходит против хода часовой стрелки).
В случае необходимости
находим по направлению
:
![]()
![]() .
.
Зная и линию действия возможного перемещения точки D – горизонталь находим , используя следствие из теоремы о проекциях скоростей двух точек плоской фигуры на ось, проходящую через эти точки.
Запишем
|
|
|
(2.8) |
Направление находится из условия равенства проекции возможных перемещений и на ось проходящую через данные точки (см.рис. )
Теперь запишем уравнение (1) для механизма:
|
(2.9) |
Заменяя
и
их
значениями (2.7) и (2.8) и вынося одновременно
![]() за
скобки, получим:
за
скобки, получим:
|
(2.10) |
Так как
![]() :
:
|
|
откуда
|
|
После подстановки
исходных данных находим
![]()