Синхронный
генератор можно заставить работать в
качестве электрического двигателя. У
них обмотка статора питается трехфазным
переменным током, а обмотка ротора
подключается к источнику постоянного
напряжения.
При
питании трехфазным переменным током
обмотки статора синхронного двигателя
возникает вращающееся магнитное поле.
Скорость вращения поля зависит от
частоты переменного тока и числа полюсов
статора.
Однако
если после включения статора включить
постоянный ток в обмотку ротора, то
ротор будет стоять на месте. Самостоятельно
он тронуться не может. Это объясняется
тем, что магнитное поле статора, вращаясь
с большой скоростью относительно
неподвижного ротора, не может мгновенно
сообщить ротору синхронную скорость
и заставить его вращаться. Так как ротор
обладает значительной массой и большой
инерцией, он не в состоянии тронуться
с места и развить необходимую скорость.
Поэтому для пуска синхронного двигателя
приходится применять специальные
устройства.
Синхронный двигатель
имеет ценное качество. Если при малых
токах возбуждения ротора он потребляет
реактивный ток из сети и работает, как
говорят, с отстающим cosφ,
то, увеличивая ток возбуждения ротора,
можно добиться того, что обмотка статора
совсем не будет потреблять реактивный
ток и cosφ
в этом случае будет равен единице.
При
дальнейшем увеличении тока возбуждения
ротора статор сам начнет отдавать в
сеть реактивный ток, и синхронный
Двигатель, продолжая нести механическую
нагрузку, превращается одновременно
в генератор реактивного тока или
реактивной мощности. В этом случае
двигатель будет как бы подобен
конденсатору и станет работать с
опережающим cosφ.
Синхронный двигатель, предназначенный
для улучшения cosφ
установки, называется синхронным
компенсатором.
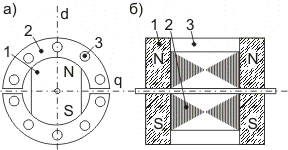
Реактивные
микродвигатели.
Синхронными
реактивными называют микродвигатели
с переменным вдоль окружности воздушного
зазора магнитным сопротивлением (Xd≠Xq)
и невозбужденным ротором. Вращающееся
магнитное поле таких микродвигателей
создается только МДС статора. Изменение
магнитного сопротивления вдоль
окружности воздушного зазора двигателя
осуществляют путем выбора соответствующей
формы и материала ротора.
19) . Сд и ск. Реактивный сд.
20) РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ явнополюсный синхронный электродвигатель без обмотки возбуждения. Магнитный поток создаётся реактивным током статора, потребляемым из сети, а вращающий момент - вследствие различия магнитных проводимостей ротора по продольной и поперечной осям полюсов. Запускается Р. с. д. методом асинхр. пуска за счёт токов, индуктируемых в массивном роторе двигателя вращающимся полем статора. Р. с. д. выполняют 1- и 3-фазными. Мощность Р. с. д. - обычно неск. Вт и редко превышает неск. сотен Вт. Благодаря простоте конструкции и отсутствию обмотки возбуждения, питаемой пост. током, Р. с. д. применяют в устройствах автоматики и телемеханики, в схемах синхронной связи, в аппаратуре звукозаписи, в радиолокации, в бытовых приборах, мед. аппаратуре и т. д.
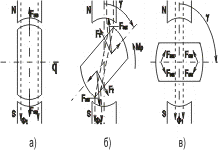
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток подаваемый в одну из обмоток статора вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого (ферромагнитного) материала или из магнито-твёрдого (магнитного) материала. Шаговые двигатели с магнитным ротором позволяют получать бо́льший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.
Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Микродвигатели
с постоянными.
В рассматриваемых микродвигателях
наиболее распространенными являются
роторы с радиальным и аксиальным
смещением постоянных магнитов и пусковой
обмотки.