

3.2. Фазові портрети лінійної системи другого порядку. Типи особливих точок
Нехай вільний рух системи описується таким лінійним диференціальним рівнянням другого порядку
![]() , (7)
, (7)
тоді характеристичне рівняння матиме вигляд
![]()
і розв’язок диференціального рівняння запишеться у вигляді
![]() ,
,
де
![]() - корені характеристичного рівняння;С1,
С2
– константи, які залежать від початкових
умов. Розглянемо фазові траєкторії та
портрети системи при різних коренях
характеристичного рівняння.
- корені характеристичного рівняння;С1,
С2
– константи, які залежать від початкових
умов. Розглянемо фазові траєкторії та
портрети системи при різних коренях
характеристичного рівняння.
1.
Припустимо, що в рівнянні (7)
![]() і λ1
і λ2
- уявні корені
і λ1
і λ2
- уявні корені
![]() .
.
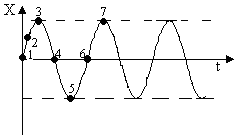
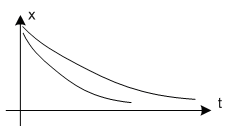
Відомо, що при наявності уявних коренів в системі виникають незникаючі коливання, амплітуда і частота яких залежить від початкових умов (див рисунок)

Зведемо рівняння (7) до системи двох рівнянь
![]() ,
,
звідки
вилучаючи
![]() ,
одержимо диференціальне рівняння
фазової траєкторії
,
одержимо диференціальне рівняння
фазової траєкторії
![]() ,
,
розв’язок якого
![]()
є рівнянням еліпса, осі якого залежать від константи С, тобто від початкових умов. Графічно фазовий портрет системи показаний на рисунку.
Особливою точкою на фазовій площині є початок координат і ця точка називається центром.
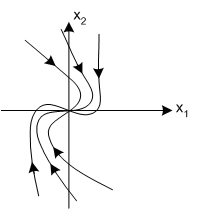
2. Припустимо, що корені λ1 і λ2 є комплексні з від'ємною дійсною частиною
![]() .
.
Це означає, що система є стійкою, а перехідний процес буде коливним і заникаючим. Фазова траєкторія сходиться до початку координат
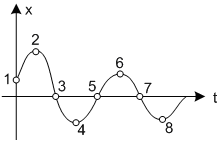
Особлива точка в такій системі знаходиться в початку координат, є точкою рівноваги і називається стійким фокусом.
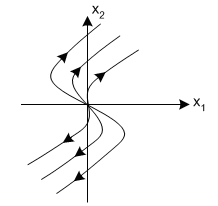
3. Припустимо, що λ1 і λ2 комплексні корені з додатними дійсними частинами. Система є нестійка, перехідний процес в такій системі є коливним і амплітуда коливань з часом зростає. Фазова траєкторія має вигляд спіралі, що розкручується і віддаляється від початку координат.

Особлива точка – нестійкий фокус.
4.
Припустимо корені характеристичного
рівняння
![]() є дійсні і додатні. Така система є
нестійкою і в ній виникатимуть розбіжні
аперіодичні процеси
є дійсні і додатні. Така система є
нестійкою і в ній виникатимуть розбіжні
аперіодичні процеси


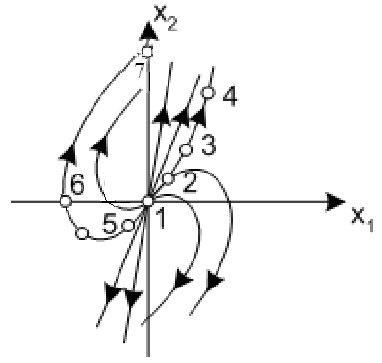
Особлива точка такої системи називається нестійким вузлом.
6. Корені дійсні і різні за знаком.


Особлива точка – сідло.
Особлива точка - Особлива точка -
вироджений нестійкий вузол. вироджений стійкий вузол.
Такі портрети властиві також і нелінійним системам, але з несуттєвими нелінійностями. Якщо система лінеаризується в околі особливої точки, то тип особливої точки однозначно визначається коренями характеристичного рівняння лінеаризованої системи:
стійкий вузол – корені дійсні від`ємні;
нестійкий вузол – корені дійсні додатні;
стійкий фокус – корені комплексні з від`ємною дійсною частиною;
нестійкий фокус – корені комплексні з додатною дійсною частиною;
центр – корені уявні;
сідло – корені дійсні різного знаку.
3.3. Побудова фазових траєкторій системи автоматичного регулювання
В найпростішому випадку нелінійну систему можна розглядати як таку, що складається з нелінійної та лінійної частин. Структурна схема такої системи показана на рис. 1.

Рис. 1. Структурна схема САР з одним нелінійним елементом.
Наявність в системі суттєво нелінійного елементу зумовлює якісно інший фазовий портрет системи, ніж в лінійній системі. В загальному випадку задача знаходження диференціального рівняння фазової траєкторії нелінійної системи та його розв’язок є складною задачею. Ситуація дещо спрощується якщо нелінійний елемент можна представити кусково лінійним (тобто лінійним в певних інтервалах зміни вхідної величини), тоді в межах кожного такого інтервалу фазові траєкторії відповідають фазовим траєкторіям лінійної системи. При переході з одного інтервалу на інший змінюється рівняння фазових траєкторій. Сукупність фазових траєкторій на кожному інтервалі складає загальну фазову траєкторію, яка будується за допомогою методу допасовування. Згідно з цим методом побудова фазової траєкторії здійснюється в три етапи:
а) модель нелінійної системи записують у вигляді набору лінійних моделей, що відповідають лінійним ділянкам нелінійного елементу;
б) фазовий простір (площину) розбивають на області, в яких система описується лінійними рівняннями;
в) послідовно отримують рівняння фазових траєкторій на кожній ділянці та об’єднують (допасовують) їх в єдину фазову траєкторію нелінійної системи.