

3. Дослідження нелінійних систем методом фазового простору
3.1. Поняття фазового простору, фазового портрету. Рівняння фазових траєкторій
В загальному вигляді вільний рух системи описується таким рівнянням
![]() , (1)
, (1)
де
![]() - вихідна величина;
- вихідна величина;
![]() - похідні відповідно першого та n-ого
порядків. Якщо ввести допоміжні змінні,
а саме
- похідні відповідно першого та n-ого
порядків. Якщо ввести допоміжні змінні,
а саме
![]() , (2)
, (2)
то рівняння (1) можна записати у вигляді системи п диференціальних рівнянь першого порядку, яка в нормальній формі матиме вигляді.
![]() (3)
(3)
Стан
динамічної системи n-го порядку у
фіксований момент часу
![]() однозначно визначається значеннями n
незалежних змінних в цей момент часу
однозначно визначається значеннями n
незалежних змінних в цей момент часу![]() .
Ці значення змінних будемо розглядати
як координати точки в n
вимірному
просторі, а саму точку зображуючою.
Цей n
вимірний простір називається простором
станів
або фазовим
простором,
а
змінні
.
Ці значення змінних будемо розглядати
як координати точки в n
вимірному
просторі, а саму точку зображуючою.
Цей n
вимірний простір називається простором
станів
або фазовим
простором,
а
змінні
![]() - фазовими
координатами.
В часі значення змінних
змінюються і зображуюча точка у фазовому
просторі рухається по кривій, яка
називається фазовою
траєкторією.
- фазовими
координатами.
В часі значення змінних
змінюються і зображуюча точка у фазовому
просторі рухається по кривій, яка
називається фазовою
траєкторією.
Сукупність фазових траєкторій, що відповідають різним початковим умовам системи називають фазовим портретом. Фазовий портрет охоплює всі можливі динамічні режими в системі.
Метод
фазового простору найбільш зручний для
дослідження систем, що описуються
диференціальним рівнянням другого
порядку. Так, застосовуючи прийняті в
(2) нові змінні
![]() ,
диференціальне рівняння другого порядку
в загальному вигляді можна представити
у вигляді системи двох диференціальних
рівнянь першого порядку
,
диференціальне рівняння другого порядку
в загальному вигляді можна представити
у вигляді системи двох диференціальних
рівнянь першого порядку
![]() (4)
(4)
Тоді
фазова траєкторія такої системи буде
розміщена у фазовій площині з координатами
![]() .
Із системи (4) вилучимо час t, для цього
поділимо друге рівняння системи (4) на
перше:
.
Із системи (4) вилучимо час t, для цього
поділимо друге рівняння системи (4) на
перше:
![]() (5)
(5)
в результаті чого одержимо диференціальне рівняння фазової траєкторії. Розв'язком цього диференціального рівняння є рівняння фазової траєкторії
![]() ,
,
де
![]() - початкова точка фазової траєкторії
на фазовій площині.
- початкова точка фазової траєкторії
на фазовій площині.
З рівняння (5) бачимо такі особливості фазової траєкторії (див. рисунок):
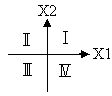
![]() додатна, рухається зліва направо, тобто
в напрямі зростання
додатна, рухається зліва направо, тобто
в напрямі зростання
![]() ,
у нижній півплощині (квадранти ІІІ і
IV), де похідна від’ємна, – справа наліво;
,
у нижній півплощині (квадранти ІІІ і
IV), де похідна від’ємна, – справа наліво;
б)
у точках перетину фазової траєкторії
з віссю абсцис
![]() ,
відповідно значення тангенсу кута
нахилу дотичної згідно рівняння (5)
прямує до
,
відповідно значення тангенсу кута
нахилу дотичної згідно рівняння (5)
прямує до
![]() і дотична до фазової траєкторії в цих
точках перпендикулярна до цієї осі;
і дотична до фазової траєкторії в цих
точках перпендикулярна до цієї осі;
в) фазові траєкторії не перетинаються між собою, за винятком особливих точок та особливих траєкторій.
Таким чином, рівняння (5) однозначно визначає дотичну до фазової траєкторії в усіх її точках за винятком тих, де одночасно виконується умова
![]()
![]() . (6)
. (6)
В цих точках є невизначеність фазової траєкторії, і отже з цих точок може виходити безліч фазових траєкторій. Такі точки в фазовій площині називають особливими, в них похідні фазових координат дорівнюють нулю, тому особливі точки характеризують стан рівноваги системи. Такі точки можуть знаходитися лише на осі абсцис. Розглянемо для прикладу особливі точки і фазові портрети динамічної системи, що описується лінійним диференціальним рівнянням другого порядку.