

17. Динамические показатели качества сау.
Рассмотрим динамические показатели авт. Систем, описываемых уравнением
A(p)y=0
Или
^x=Ax x0=x(0) (2)
^y=Cx y0=y(o) (3)
Решение уравнения 2 и 3 будет записываться в виде
X(t)=eAtx0 (4)
Y(t)=CeAty0 (5)
Решениями уравнений 4 и 5 соотв. Свободной составляющей yсв(t) и xсв(t) (возмущ. системы)
Для устойчивой авт. Системы должны выполнятся условия устойчивости
X(t)-> 0
Y(t)-> 0
Д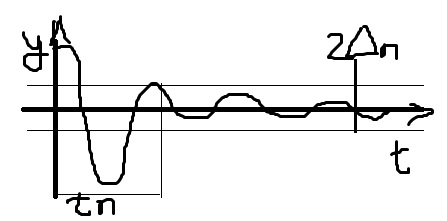 ля
анализа динамических свойств вводят в
рассмотрение динамические показатели
качества, т.е. численные оценки
быстродействия и колебательности
системы
ля
анализа динамических свойств вводят в
рассмотрение динамические показатели
качества, т.е. численные оценки
быстродействия и колебательности
системы
А) Время переходного процесса (tп)
tп-время, за которое система входит в дельта окрестность навсегда; дельта=δп|yy|;
δп=0,05
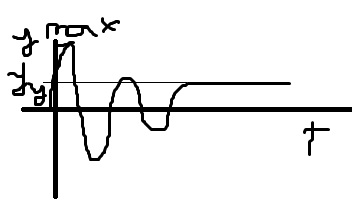
Б) Перерегулирование
_δ=|ymax-yy/yy|*100%
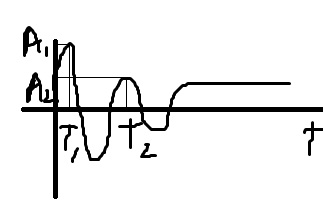
В) Затухание
ξ=(A1-A2)/A1
A1=y(t1)
A2=y(t2)
18.Точностные характеристики сау. Определение установившейся ошибки.
Установившаяся ошибка
![]() представляет собой функцию времени,
удовлетворяющую условию
представляет собой функцию времени,
удовлетворяющую условию
![]() для
любых начальных условий
для
любых начальных условий
![]() и заданного входного воздействия
и заданного входного воздействия
![]() .
Другими словами, она характеризует
ошибку слежения, установившуюся после
завершения переходного процесса.
.
Другими словами, она характеризует
ошибку слежения, установившуюся после
завершения переходного процесса.
Для приближенной оценки установившейся
ошибки слежения
![]() при произвольном (но достаточно гладком)
входном воздействии
можно воспользоваться следующей
методикой. Разложим
при произвольном (но достаточно гладком)
входном воздействии
можно воспользоваться следующей
методикой. Разложим
![]() в ряд Тейлора в окрестности точки
в ряд Тейлора в окрестности точки
![]()
![]() , где
, где
![]() ,
,
![]() .
Тогда получаем выражение установившейся
ошибки при произвольном входном
воздействии
.
Тогда получаем выражение установившейся
ошибки при произвольном входном
воздействии
![]() ,
где постоянные
,
где постоянные
![]() носят название коэффициентов ошибок.
Если
изменяется
достаточно медленно, то для приближенной
оценки
носят название коэффициентов ошибок.
Если
изменяется
достаточно медленно, то для приближенной
оценки
![]() можно использовать конечное число
членов ряда.
можно использовать конечное число
членов ряда.
19.Точностные характеристики сау. Расчет предельного значения ошибки.
Предельное значение установившейся
ошибки
![]() определяется выражением
определяется выражением
![]()
Величина предельного значения
установившейся ошибки при типовом
задающем воздействии может быть
достаточно просто рассчитана по
передаточной функции системы. Пусть
образы Лапласа ошибки слежения
![]() и сигнала задания
и сигнала задания
![]() связаны
соотношением
связаны
соотношением
![]() ,
где
— известная передаточная функция
замкнутой системы по ошибке слежения
(относительно задающего воздействия).
Например, для систем с единичной
отрицательной обратной связью имеем
,
где
— известная передаточная функция
замкнутой системы по ошибке слежения
(относительно задающего воздействия).
Например, для систем с единичной
отрицательной обратной связью имеем
![]() ,
где
,
где
![]() — передаточная функция разомкнутой
системы, включающая в себя передаточные
функции регулятора и объекта управления.
Тогда, в соответствии с теоремой о
предельном переходе во временной
области, имеем
— передаточная функция разомкнутой
системы, включающая в себя передаточные
функции регулятора и объекта управления.
Тогда, в соответствии с теоремой о
предельном переходе во временной
области, имеем
![]() .
.
20.Точностные характеристики сау. Понятие астатизма.
В качестве универсальной характеристики
точностных свойств систем управления
используется понятие порядка астатизма
(по отношению к входному воздействию).
Система называется статической (или
— с нулевым порядком астатизма),
если в выражении
![]() .
Говорят, что система имеет k-й
порядок астатизма, если в выражении
.
Говорят, что система имеет k-й
порядок астатизма, если в выражении
![]() для всех
для всех
![]()
![]() и
и
![]() .
.
Для систем с единичной отрицательной обратной связью порядок астатизма может быть достаточно просто определен на основе анализа структурных свойств системы. Так, система на рис.7.1 является статической (т.е. с нулевым порядком астатизма), если
![]() ,
где
,
где
![]() — общий коэффициент усиления разомкнутой
системы.
— общий коэффициент усиления разомкнутой
системы.
Передаточная функция разомкнутой системы может быть представлена в виде
![]() ,
где
,
где
![]() — передаточная функция статической
системы (т.е.
— передаточная функция статической
системы (т.е.
![]() ).
При этом число
).
При этом число
![]() соответствует порядку астатизма.
соответствует порядку астатизма.