

13. Устойчивость сау. Типы устойчивости.
Под устойчивость системы САУ понимается способность системы возвращаться в исходное положение равновесия после прекращения входного сигнала.
Типы:
У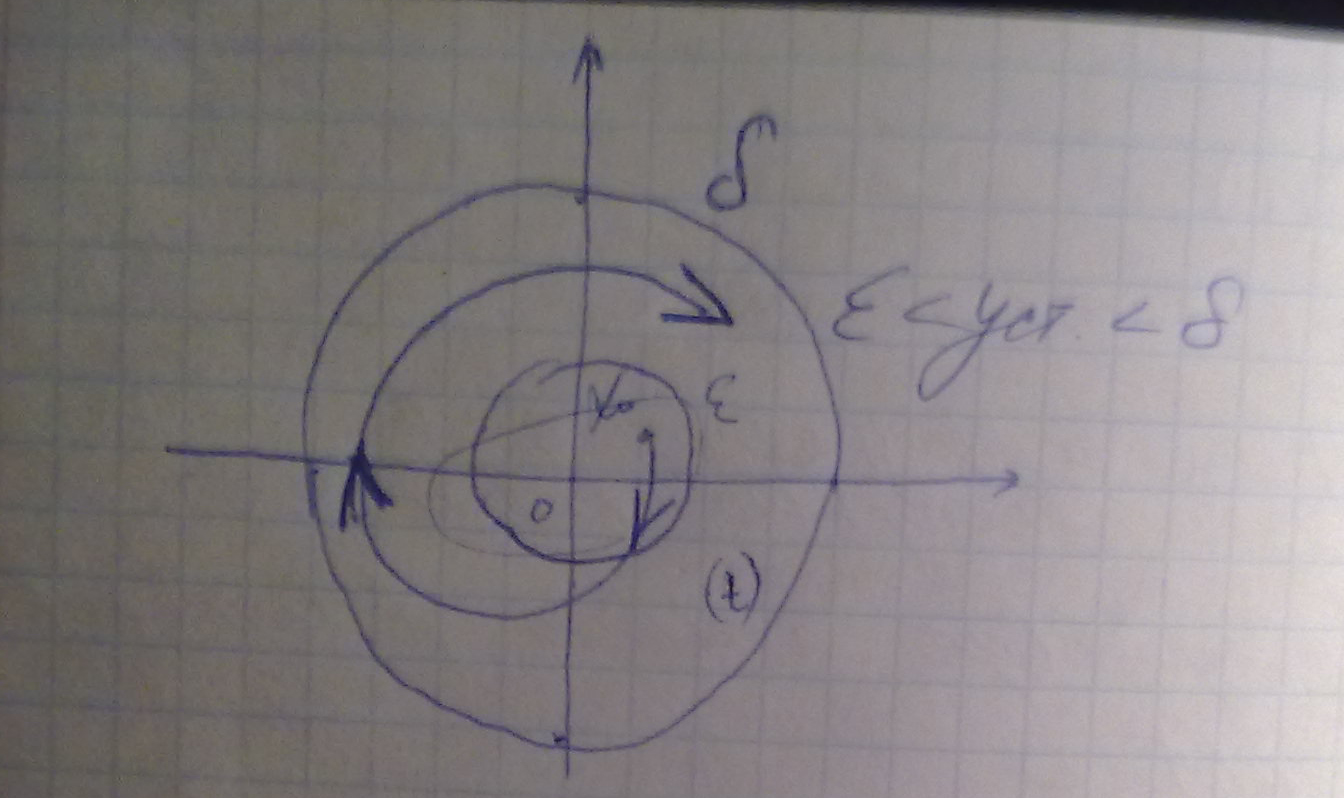 стойчивость
по Ляпунову
стойчивость
по Ляпунову
Будем говорить, что положение равновесия x=0 устойчиво по Ляпунову, если для любых траекторий движения x(t), порождаемых н.у. x(0) ограниченными неравенством ||x(0)||<=ε ε>0 , существует δ> ε, для которой ||x(t)||<=δ
||x||=sqrt(x12+x22+…+xn2)
А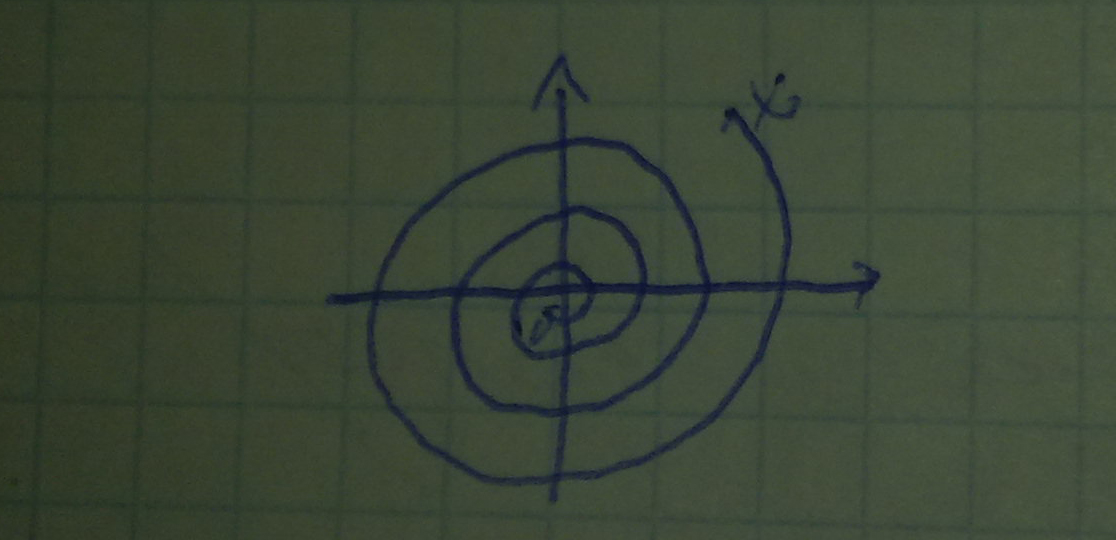 симптотическая
устойчивость
симптотическая
устойчивость
Будем говорить, что положение x=0 асимпт. Устойчиво, если оно устойчиво по Ляпунову и для любых траекторий движения, поражденных произвольными н.у. верно высказывание lim(t->inf) ||x(t)||=0
Экспоненциальная устойчивость
Будем говорить, что x=0 экспоненциально устойчиво, еcли для всех траекторий x(t), порожденных произвольными н.у. существуют такие
_β>=1 α>0
что для любого момента времени справедливо нерав.
||x(t)||<= β*e-αt||x(0)||
Окрестность Н.У.
||x(0)||<C0
(C0
>0-
окрестность)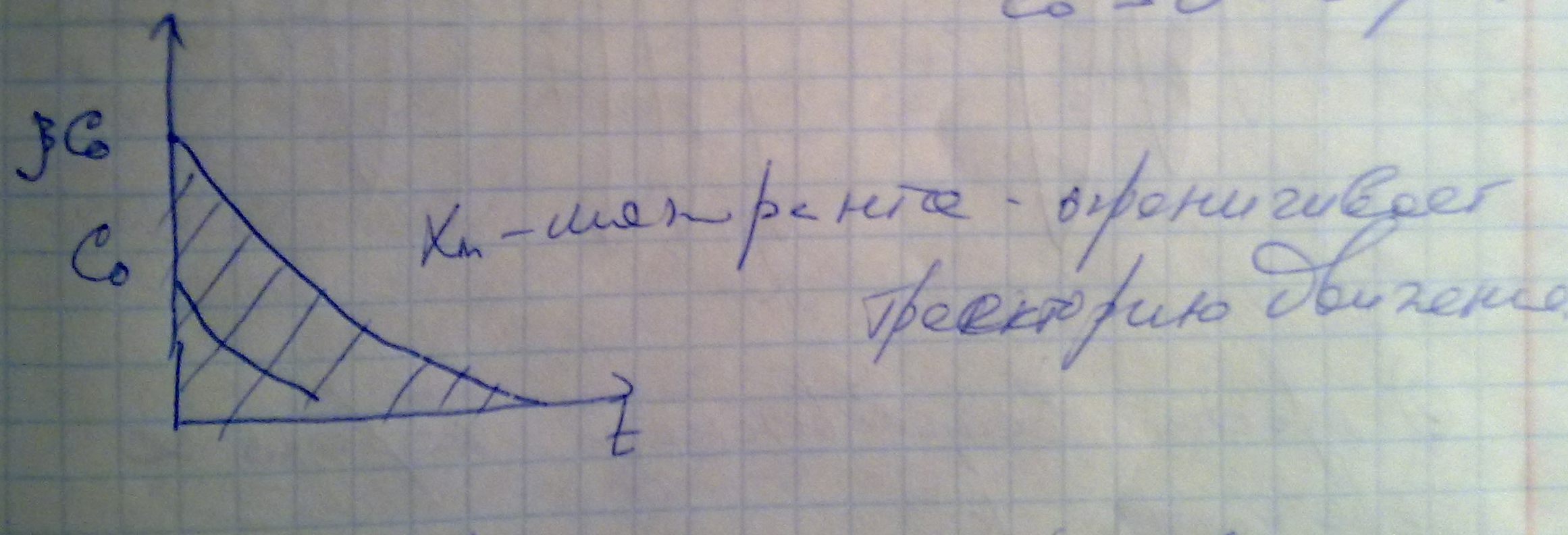
14. Устойчивость сау. Корневой критерий устойчивости.
Простой вещественный корень α
Yсв(t)=Ceαt…….3 графика C(t)
Возрастающий – неуст
Постоянн – по Ляпунову
Падает экспоненц. уст
Пара комплексно сопряженных корней
Ycв(t)=Aeαtsin(βt+ψ)
3 колеблящихся (торнадо) графика yсв(t)
Увели – неуст
Const(sint) – по ляпунову
Торнадо асимптот.
Простой вещественный корень α кратности k
Yсв=C1eαt+C2teαt^2+C3t^2eαt^3+…+
_α>0 yсв(t)->inf – система неустойчива
_α=0 yсв(t)->inf – система неустойчива
_α<0 yсв(t)->0 – система устойчива асимптотически
Пара комплексно сопряженных корней кратности k
Yсв(t)=A1eαt(sinβt+ψ)+A2teαt^2(sinβt^2+ψ)…
_α>0 yсв->inf – не устойчива
_α=0 yсв->inf – не устойчива
_α<0 |yсв|->inf – асимптотически устойчива
Для того, чтоюы система была устойчива необходимо, чтобы все корни характерист. Уравнения были не кратными и имели отрицательную вещественную часть. Если хоть один корень имеет положительную вещественную часть -> неустойчива.
15. Устойчивость сау. Алгебраический критерий устойчивости.
Знаменатель – D(p)=pn+an-1pn-1+…+a0p+a0
Линейная система с характеристическим уравнением ^ будет асимптотически устойчива, если все диагональные определители матрицы Гурвеца положительны. Если хоть один – отрицательный, то неустойчива. Если хоть один =0 устойч. По Ляпунову. Для систем начиная с 3 порядка кроме положительности коэффициентов должно выполнятся еще одно соотношение (произведение крайних членов знаменателя передаточной функции должно быть меньше произведению средних)
16. Управляемость и наблюдаемость систем управления.
Линейная система полностью управляема, если для любых t0 ≥ 0 и xf ∈
R^n существует tf ≥ t◦ и ограниченное управление u(t), t ∈ [t0, tf ] такое, что для x(t0) = x0 выполняется x(tf) = xf .
1) Для линейных систем это означает, что любое состояние достижимо из любого другого.
2) Если управляемая линейная система стационарна, то попадание в xf можно обеспечить за любое заданное времяT > 0 (T = tf−t0)
3) Свойство управляемости не зависит от выходной переменной y и поэтому может быть определено как свойство модели.
матрица управляемости размерности n × n
U = |B : AB : A^2 B...A^n−1 B|
Система полностью управляема тогда и только тогда, когда ранг матрицы управляемости равен порядку системы, т.е. rankU = n.
Система полностью управляема тогда и только тогда, когда матрица управляемости не вырождена, т.е. detU не равен 0.
Система полностью управляема тогда и только тогда, когда она может быть преобразована к канонической управляемой форме.
Системы, в которых матрица входа равна нулю (B = 0) с очевидностью являются неуправляемыми.
Система называется полностью наблюдаемой, если для любых t◦ ≥ 0 существует t1 > t0 такое, что выходной переменной y = y(t), t ∈ [t0, t1] полученной для входного сигнала u(t), соответствует единственное значение x(t0) = x0.
1) Для стационарной наблюдаемой линейной системы значение x(t0) можно определить за любое заданное время T > 0 (T =t1 – t0).
2) Т.к. наблюдаемость, если она есть, должна быть при нулевом входе, можно считать, что система наблюдаема, если для неё по y[t0,t1] можно однозначно определить x(t0) при u(t) = 0.
Для анализа наблюдаемости линейных систем используется матрица наблюдаемости размерности n × n:
Q = | C |
| CA |
| CA^2 |
| : |
|CA^n−1 |
Система полностью наблюдаема тогда и только тогда, когда матрица наблюдаемости не вырождена, т.е. detQ не равен 0.
Система полностью наблюдаема тогда и только тогда, когда матрица наблюдаемости имеет ранг, который совпадает с порядком ОУ, т.е. rankQ = n.
Система полностью наблюдаема тогда и только тогда, когда она может быть преобразована к канонической наблюдаемой форме.