

11. Типовые динамические звенья второго порядка и их характеристики.
Апериодическое звено 2-го порядка описывается дифференциальным уравнением:
![]() или
или
![]() ,
,
где
![]() - постоянные времени, причем
- постоянные времени, причем
![]() .
При этом корни характеристического
уравнения
.
При этом корни характеристического
уравнения
![]() будут вещественными и отрицательными.
будут вещественными и отрицательными.
Знаменатель передаточной функции апериодического звена 2-го порядка разлагается на множители:
![]() ,
,
где ![]() ,
, ![]()

![]() .
Его переходная функция имеет вид
.
Его переходная функция имеет вид
 .
.
Колебательное звено описывается
тем же дифференциальным уравнением,
что и апериодическое звено второго
порядка. Однако корни характеристического
уравнения
![]() должны быть комплексными, что будет
выполняться при
должны быть комплексными, что будет
выполняться при
![]() .
.
![]() ,
,
где
![]() -
период свободных колебаний при отсутствии
затухания,
-
период свободных колебаний при отсутствии
затухания,
![]() - параметр затухания, лежащий в пределах
- параметр затухания, лежащий в пределах
![]() .
Переходную функцию данного звена можно
представить в виде
.
Переходную функцию данного звена можно
представить в виде
![]() ,
,
где
![]() ,
,
![]() .
Параметр
.
Параметр
![]() легко определяется по графику переходной
функции, а параметр
легко определяется по графику переходной
функции, а параметр
![]() находится посредством выражения
находится посредством выражения
![]() .
.
Интегрирующее звено с замедлением описывается дифференциальным уравнением:
![]() или
или
![]()
где
![]() -
постоянная времени, а его переходная
функция
-
постоянная времени, а его переходная
функция
![]() .
.


![]() .
Тогда корни характеристического
уравнения
.
Тогда корни характеристического
уравнения
![]() будут чисто мнимые. Передаточная функция
колебательного звена имеет вид
будут чисто мнимые. Передаточная функция
колебательного звена имеет вид
![]() ,
,
а его переходная функция - ![]() ,
,
где
![]() .
.
12. Типовые включения динамических блоков. Правила преобразования структурных схем.
Под структурной схемой СУ понимается графическое изображение СУ, в которой каждый элемент схемы изображается в виде блока с указанием входной и выходной переменной, внутри блока записывается передаточная функция, связывающая входную и выходную переменную, и, кроме того, указываются все связи между элементами системы.
Графические элементы.
T
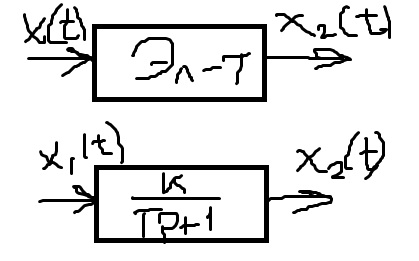 *dx2/dt+x2=kx
*dx2/dt+x2=kx
P=d/dt; T*x2p+x2=kx1
W(p)=x2(p)/x1(p)= k/(Tp+1)
Э
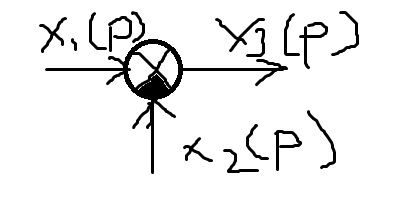 л-т
сравнения
л-т
сравнения
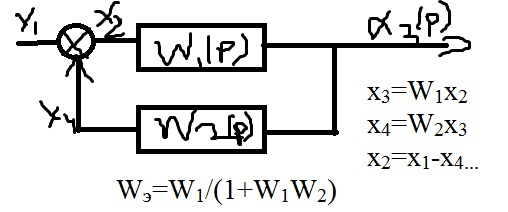
X3(p)=x1(p)-x2(p)
С
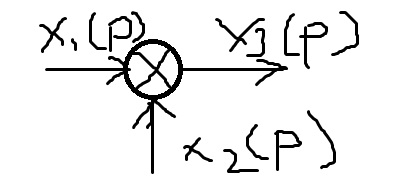 умматор
умматор
X3(p)=x1(p)+x2(p)
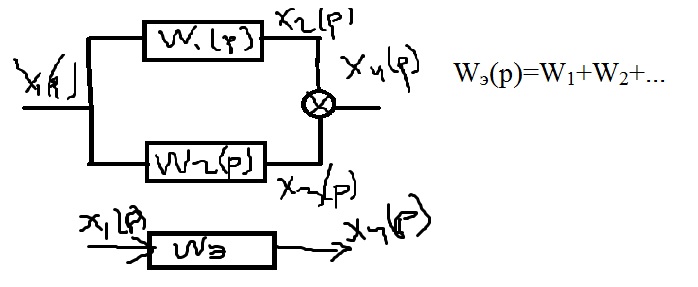
Последовательное соединение элементов
Е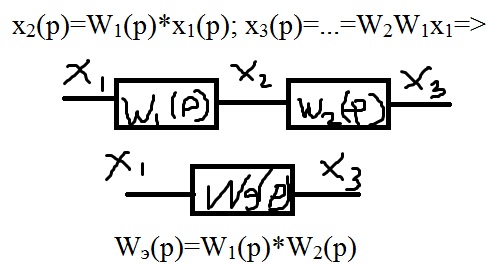 сли
в системе есть k
посл. Элементов, то экв. Передаточная
функция определяется произведением
передаточных элементов.
сли
в системе есть k
посл. Элементов, то экв. Передаточная
функция определяется произведением
передаточных элементов.
Параллельное соединение
Соединение с ООС
Соединение с ПОС

Последовательность структурных преобразований
На структурной схеме для каждого элемента вводятся обозначения входных и выходных переменных.
Для каждого из элементов структурной схемы составляется уравнение связи между выходной и входной переменными. Полученная система уравнений задаёт описание всей структурной схемы. Число уравнений соответствует числу структурных элементов.
Последовательной подстановкой одного уравнения в другое исключаются промежуточные переменные, пока не останется уравнение связи между интересующими нас переменными, по которому и отыскивается искомая передаточная функция.