

1.2 Классификация агентов
Общая классификация агентов представлена на рисунке:
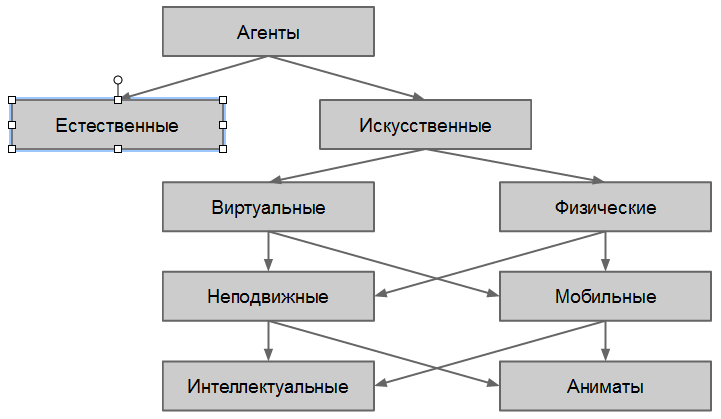
рис.1 Общая классификация агентов
1.2.1 Дихотомии «естественное – искусственное» и «материальное – идеальное»
Можно предложить немало различных оснований для построения классификаций агентов. Наиболее очевидными являются критерии классификации, связанные с полярными шкалами “естественное – искусственное” и “материальное — идеальное”. По первому критерию выделяются натуральные агенты (животное, человек, стада животных, коллективы людей) и искусственные агенты (роботы, коллективы автоматов, сложные компьютерные программы).
Согласно второму критерию, все искусственные агенты подразделяются на:
1) материальных, физически существующих и работающих в реальном пространстве, например, интегральные роботы, наделенные различными средствами “очувствления”, манипуляторами или педипуляторами;
2) виртуальных, существующих лишь в некоторой программной среде (виртуальном пространстве), которых нередко можно представить как роботов, занятых не физической, а информационной работой; такие “программные роботы” (software robots) называют сокращенно софтботами (softbots).
1.2.2 Дихотомии «сосредоточенное – распределенное» и «неподвижное – подвижное»
Еще одна пара взаимосвязанных критериев классификации опирается на дихотомии “сосредоточенное-распределенное” и “неподвижное – подвижное”. Примером неподвижного агента служит промышленный манипуляционный робот, а примером мобильного— программный поисковый агент, мигрирующий по компьютерной сети в целях отыскания нужной информации.
Важным основанием для классификации служит наличие (отсутствие) у агентов характеристик обучаемости или адаптивности. У обучаемых агентов поведение основано на предыдущем опыте.
1.2.3 Дихотомия «психологическое – биологическое». Разделение по уровню субъектности
Еще одним важнейшим основанием для классификации искусственных агентов служит принятие либо психологической, либо биологической метафоры при рассмотрении природы их действий (дихотомия “психологическое — биологическое”). В одном случае, речь идет о трактовке агентов как квазисубъектов, самостоятельно решающих встающие перед ними задачи, а в другом они уподобляются простейшим организмам, непосредственно реагирующим на изменения среды в интересах выживания и адаптации. В частности, исходя из биологической метафоры, строились М-автоматы Н. М. Амосова, а позднее стали конструироваться “аниматы”, т. е. искусственные животные, которые в процессе выживания должны приспосабливаться ко все более сложным и враждебным средам. Аниматы могут быть реализованы и как виртуальные агенты (имитация на компьютере), и как роботы, действующие в реальном физическом мире.
В целом, данная типология агентов тесно связана с классической проблемой взаимодействия “субъект — объект”. Уровень субъектности агента непосредственно зависит от того, наделен ли он символьными представлениями, требующимися для организации рассуждений, или в противоположность этому он работает только на уровне образов (субсимвольном), связанных с сенсомоторной регуляцией. Тогда классификацию агентов (рис.2) можно построить по следующим двум признакам: а) степень развития внутреннего представления внешнего мира и б) способ поведения.

рис.2 Классификация агентов по степени субъектности и по способу поведения