

32)Основные эргономические характеристики человека-оператора.
См вопрос 31 и 33
33) Формирование и приём сигналов управления в системе «человек-машина».
Прием сигнала среди органов чувств такой: 1)зрение (до 80% информации), 2) слух (до 15%), 3)обоняние, осязание, вкус (на все 3 около 5%)
Зрение:
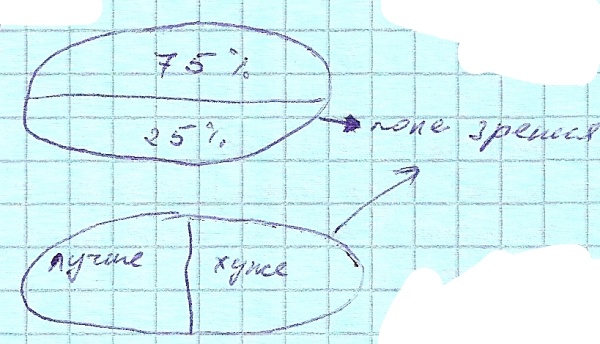
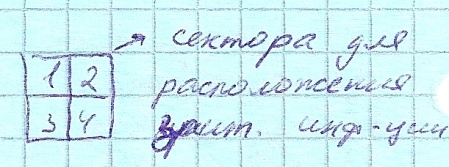
Вывод: расположение индикаторов должно учитывать особенность зрения
Слух:
необходимо использовать для кратких сообщений
однокональная индивидуальная связь
Остальные органы чувств – практически не используются в электронике.
Обработка информации, ее генерация, принятие решений существенно зависит от психологических характеристик человека:
Из псих.характеристик необходимо оценить:
характеристики памяти человека:
а) долгосрочную (часы, годы…) до 105бит
б) кратковременную (время несколько десятков секунд), объем 10-15 слов или 150-200бит
Скорость подачи информации в этом случае играет очень большую роль..для долговременной нужно медленнее читать текст, например, чем для кратковременной
принятие решения:
а) стереотипное решение(простые, многоповторяемые)-принимаются за 0,1-0,2 сек
б) мыслительные решения – тратим несколько секунд
в) проблемное решение(нехватает информации, неизвестен алгоритм)- много времени
Вывод: а) и б) пусть считает машина, она это сделает намного быстрее(в 1000 раз быстрее)
ВВОД сигналов:
Осуществляется в основном за счет антропометрических особенностей человека.
Существует ножное и ручное управление
Результатом этой информации является всевозможные регуляторы (рычаги, ручки, кнопки)
Из вариантов движения рук самое лучшее (точность установки)- вертикальное движение, а самые неудачные –круговые.
При вводе сигналов надо учитывать двигательные функции человека.
Вывод: человек простую обработку информации делает медленнее, чем машина, а сложную наоборот, так как человек подвержен воздействию окружающей среды.
Повышение эффективности:
организационные возможности
а)Параллельная работа нескольких операторов
б)Дополнительные контуры управления
в)учет психо-физиологических факторов
2) конструктивные меры (круглые сигналы, специальные элементы управления)
34) Задача определения предварительного определения варианта конструкции – задача компоновки.
Перечень и возможная последовательность задач при компоновке микроэлектронных узлов (микросборок) и ячеек (субблоков) приведены на рис. 6.4.
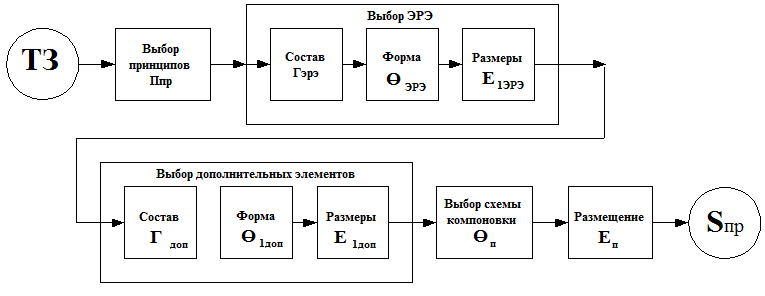
На первом этапе необходимо установить совокупность принципов Ппр, по которым будет организовано в пространстве в единую систему Sпр множество элементов Г. Исходя из общих положений далее необходимо определить состав элементов системы.
Процедура определения полного перечня элементов Г распадается на два этапа:
выбор совокупности элементов Гэрэ схемы, объединяемых в данном модуле;
выбор перечня дополнительных элементов Гдоп для объединения Гэрэ элементов, защиты модуля и т.д.
Особенность задачи состоит в том, что одновременно с процедурой определения состава элементов Г, определяются форма и размеры этих элементов, т.е. решаются задачи поиска множества унарных отношений элементов схемы Гэрэ и дополнительных элементов Гдоп:
Θ1эрэ, Е1эрэ - формы и размеры элементов Гэрэ;
Θ1доп, Е1доп - форма и размеры Е1доп.
На третьем этапе доопределяется структура Θпр пространственной (компоновочной) системы Sпр. При этом устанавливается схема взаимного положения элементов в модуле, т.е. определяется структура n-арных отношений Θn элементов.
На последнем этапе доопределяется совокупность значений параметров Еnпр n-арных отношений, т.е. находятся координаты установки элементов на плоскости.
Рассмотрим другую группу особенностей задачи, связанную с наличием априорной информации о компоновке модулей нижних уровней.
Известно, что эти модули строятся так, что пространственное, механическое и электрическое объединение их осуществляется на плоскости.

Рис. 6.5. Принцип объединения элементов.
Следовательно, основной принцип р1 объединения элементов в модуле известен заранее - "принцип плоскостного объединения". Очень часто задается способ будущего расположения элементов в модуле, например, "устанавливать по рядам и столбцам", т.е. становится известным и принцип р2.
В целом можно считать, что множество принципов Ппр, Ппр = {р1, р2,… рк}, пространственного объединения элементов в модуле в основном известно.
Кроме того известен и основной дополнительный элемент γ1ДОП конструкции - объединительная плата.
Знание принципа р1 и элемента γ1ДОП дает возможность заранее определить основные структуры (схемы) компоновки Θпр модулей, рис. 6.6.
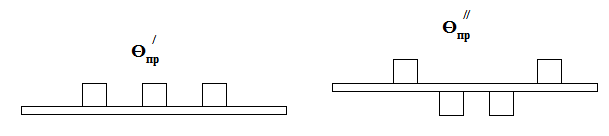
Рис. 6.6. Структуры (схемы) объединения.
Так появились односторонняя (Θ'пр структура) схема и двусторонняя (Θ''пр структура) схема установки элементов на плате - типовые схемы компоновки.
Типизация и стандартизация конструкций модулей в еще большей степени увеличили объем априорно известной информации о построении модулей за счет введения ряда их типоразмеров.