

Алгоритм стабилизации
Системы, предназначенные для поддержания заданного постоянного значения управляемой величины, называют системами стабилизации. В качестве примера можно привести системы стабилизации температуры, расхода, уровня вещества в химическом аппарате.
Алгоритм функционирования системы в этом случае имеет следующий вид:
|
(2.3) |
Алгоритм программного управления
В
системах программного управления
алгоритм функционирования может быть
задан в виде временной программы
или в виде параметрической программы
![]() ,
задаваемой в текущих координатах.
,
задаваемой в текущих координатах.
Временными программами являются, например, программа изменения температуры закалочных печей, программа работы магнитофона и т.д. К параметрическим программам относятся: программа управления металлообрабатывающим станком, программа выполнения заданного закона изменения высоты при автоматической посадке самолета.
Алгоритм слежения
В следящих системах алгоритм функционирования заранее неизвестен. Управляемая величина в таких системах должна воспроизводить изменение внешнего сигнала, следить за ним. На входе системы управления помещается устройство слежения за изменением внешнего сигнала.
Оптимальный алгоритм функционирования
Развитие вычислительной техники и теории управления сделало возможным решение задач построения систем, оптимальных по какому-либо технико-экономическому критерию (то есть наилучших в каком-либо смысле).
Для решения задачи оптимального управления необходимо иметь информацию о свойствах и состоянии объекта. В управлении динамическими техническими системами оптимизация существенна именно для переходных процессов. Нахождение оптимального управления в этом случае требует решения в процессе управления достаточно сложной математической задачи методами вариационного исчисления или математического программирования.
Функциональная схема оптимальной системы управления представлена на рис. 2.6.

Рис. 2.6. Оптимальная система управления
На вход ЭВМ поступают:
информация о текущих значениях координат
 с выхода объекта,
с выхода объекта,информация о внешних воздействиях
 ,
,граничные значения
 ,
,
 ,
,
 ,
,
 ,
,критерий оптимальности
 ,
который может вычисляться по формуле
,
который может вычисляться по формуле
|
(2.4) |
ЭВМ
вычисляет
![]() по заранее заложенной программе. Второе
слагаемое в критерии определяется
структурой модели объекта. Функция
по заранее заложенной программе. Второе
слагаемое в критерии определяется
структурой модели объекта. Функция
![]() чаще всего имеет квадратичный вид.
чаще всего имеет квадратичный вид.
Адаптивный алгоритм функционирования
При работе в реальных условиях внешние воздействия (возмущения) могут изменить не только координаты, но и параметры системы, а именно коэффициенты в уравнениях, описывающих систему управления. Эти изменения могут привести к полной потери работоспособности САУ. Устранить потери качества можно путем изменения параметров и (или) структуры системы.
Системы, автоматически изменяющие значения своих параметров или структуру при непредвиденных изменениях внешних условий на основании анализа состояния или поведения системы так, чтобы сохранялось заданное качество ее работы, называют адаптивными системами2.
При управлении любая автоматическая система в определенном смысле приспосабливается к изменениям среды. Поэтому к понятию адаптации относят лишь такие виды приспособления, которые осуществляются путем изменения управляющим устройством параметров или структуры системы согласно данным анализа ее работы.
Адаптивные системы, в которых изменяются значения параметров, называются самонастраивающимися. Если меняются структура и алгоритм управления, то система называется самоорганизующейся.
Схема, которая поясняет принцип адаптивного управления, представлена на рис. 2.7.
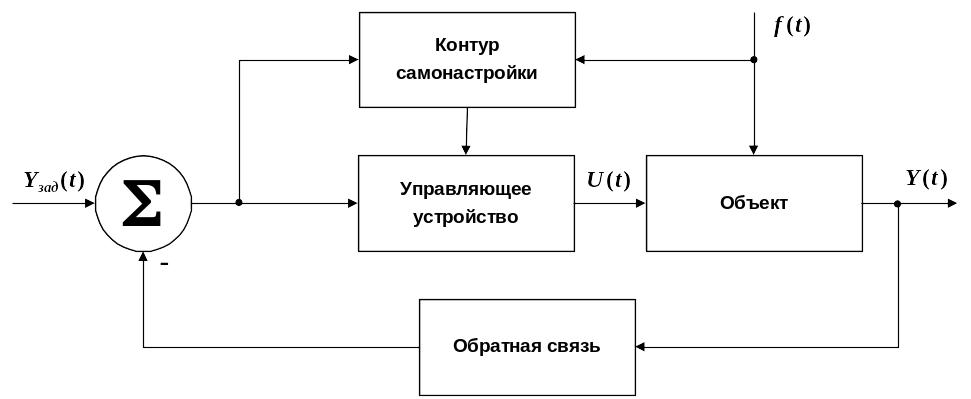
Рис. 2.7. Адаптивная система управления
Обычно адаптивная система содержит основной контур, реализующий один из фундаментальных принципов управления, и контур адаптации, осуществляющий коррекцию параметров или структуры. При вычислении управляющего воздействия для коррекции используется ЭВМ.