

1.9.2. Информация в системе управления
Информация выступает в процессах управления в форме сигнала (сигнал - знак, совокупность первичных признаков). Взаимодействие сигнала и системы характеризуется избирательностью: система реагирует не на всякий поступивший в неё сигнал, а лишь на те из них, которые соответствуют природе системы и необходимы для её управления в данное время и в данных условиях. В процессе работы элементов системы осуществляется преобразование информации. Благодаря информационным процессам система способна осуществлять целесообразное взаимодействие с внешней средой, взаимодействие собственных элементов, направлять движение системы к заданной заранее цели.
С точки зрения функционального назначения устройств и систем можно выделить следующие информационные процессы:
получение (отбор, измерение) информации,
передача информации,
обработка (преобразование) информации,
представление (регистрация, отображение) информации,
выработка управляющих воздействий (регулирование, управление).
Прохождение информации и основные этапы ее преобразования представлены на рисунке 1.6. В качестве примера показан комплекс технических устройств, предназначенных для управления автоматизированным объектом.
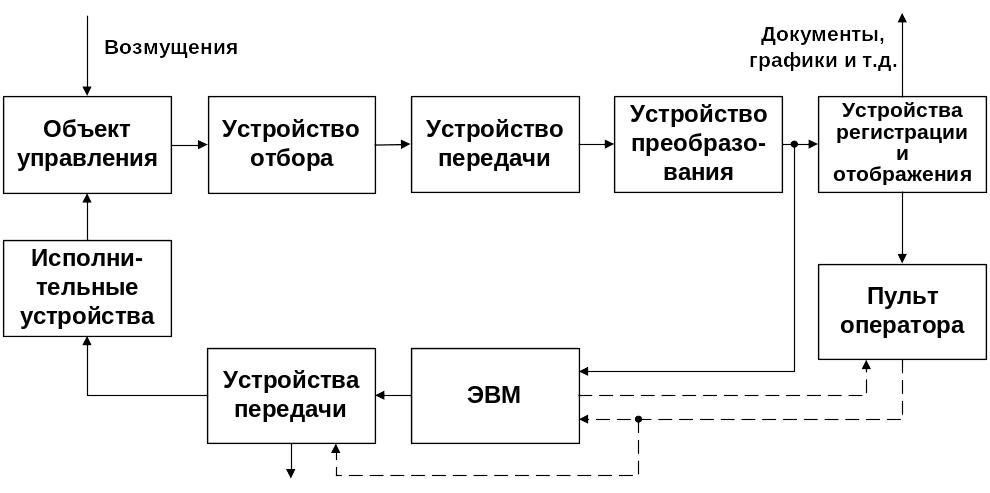
Рис. 1.6. Схема прохождения и преобразования информации в
Автоматизированной системе управления
Управляющее воздействие состоит в том, что несущий информацию сигнал осуществляет регулирование или управление с помощью исполнительных устройств, вызывая изменения в объекте управления. Таким образом, можно говорить, что управление представляет собой процесс сбора, передачи и обработки информации, а информационная система является обязательным элементом управляющей системы.
№5
1.10. Модель. Моделирование
Основным методом изучения управляемых (кибернетических) систем является моделирование. Моделирование как метод получения информации о поведении систем занимает промежуточное место между аналитическим исследованием и натурным экспериментом.
Изучение каких-либо свойств оригинала путем построения модели и изучения ее свойств называется моделированием.
Модель – это объект любой физической природы, который способен замещать любой исследуемый объект-оригинал так, что изучение модели (более доступного объекта) дает новые знания об оригинале. Модель всегда в том или ином отношении проще, доступнее оригинала. Она позволяет изучать свойства объекта-оригинала, когда изучение натуры невозможно, неудобно, дорого, опасно, длительно и т. д.
Моделирование – один из наиболее распространенных способов изучения различных процессов и явлений. От того, насколько удачно выбрана модель, зависит успех исследования, достоверность полученного с ее помощью результата.
Моделирование бывает физическим и математическим. При физическом моделировании модель воспроизводит изучаемый процесс (оригинал) с сохранением его физической природы (например, военные учения, макет гидроэлектростанции, деловая игра, лабораторная установка). Между оригиналом и моделью сохраняются некоторые соотношения подобия, которые изучает теория подобия.
В теории управления широкое применение нашло математическое моделирование. Под математическим моделированием понимают разработку математических моделей, т. е. системы математических соотношений, описывающих изучаемый объект, и изучение с их помощью некоторых свойств оригинала.
Получение решений с помощью моделей связано, как правило, со значительным объемом вычислений. Эти трудности разрешаются при использовании ЭВМ, программных средств и специальных методов. Применение математической модели в исследованиях часто называют вычислительным экспериментом.
Для изучения процессов управления используют так называемую кибернетическую модель. Она может быть математической или смешанной. Построение кибернетической модели и ее последующее исследование называется кибернетическим моделированием.
При моделировании движения управляемых систем широко используется понятие "черного ящика" (рис. 1.7). Макроподход, при котором применяется метод "черного ящика", предполагает исследование систем, внутренняя структура которых недоступна для наблюдения. При этом внешнему наблюдателю доступны лишь входные и выходные величины изучаемой системы.

Рис. 1.7. Принцип "черного ящика"
При разработке систем управления различными объектами (процессами) применяют различные виды моделей:
функциональные;
модели физического процесса;
экономические (плановые и производственные);
процедурные (информационные, модели режимов, обеспечения безопасности работы).
Все перечисленные выше модели взаимосвязаны и образуют общую модель объекта (системы). Следует подчеркнуть значимость модели и моделирования при решении задач идентификации, адаптации и оптимизации в системах управления.
№6
Изобретение ЭВМ (ЭЦВМ) часто сравнивают по воздействию на технический прогресс с промышленной революцией. Ее арифметические и логические возможности могут быть использованы для управления, обеспечивающего эффективное проведение современных сложных процессов. Кибернетика породила идею всеобщности и глобальности управления, ЭВМ явилась сильнейшим инструментом внедрения этой идеи в практику.
Каковы же функции ЭВМ в системе управления?
Основными функциями ЭВМ являются:
сбор и обработка разнообразной, большого количества информации о состоянии объекта, представление ее в виде, удобном для управления;
изучение процесса при различных условиях и построение (синтез) математической модели, с помощью которой выбирается управление;
расчет управляющего сигнала, приводящего объект в требуемое состояние в соответствии с заданной целью; можно промоделировать много вариантов и выбрать наилучшее управление;
коррекция (адаптация) модели на базе новой информации о действительном состоянии объекта;
непосредственное цифровое управление (НЦУ); ЭВМ обращается к контурам управления или по очереди, или с частотой, определяемой требованиями процесса;
оптимизация процесса управления;
адаптация алгоритма и параметров управляющего устройства;
программное прерывание, защита памяти;
обеспечение связи (общения) человека с системой управления объектом.
В качестве примера на рисунке 1.8 показаны основные функциональные элементы системы управления технологическим процессом и их взаимосвязь с ЭЦВМ и объектом.
В заключение отметим основные проблемы теории управления (кибернетики):
существует проблема постановки цели управления, в этом процессе большое значение имеет интуиция;
разработка новых алгоритмов управления;
обеспечение устройства управления требуемой качественной информацией, которую предоставляют современные датчики и информационно-измерительные системы;
разработка интеллектуальных систем управления, использующих логические и вычислительные возможности современных ЭВМ.

Рис.1.8. Система управления технологическим процессом
№7
В основу построения систем автоматического управления положены общие принципы управления, определяющие, каким образом связаны алгоритмы функционирования и управления с фактическим функционированием системы или с причинами, вызывающими отклонение функционирования от заданного.
В настоящее время в технике используются три фундаментальных принципа:
принцип разомкнутого управления;
принцип компенсации;
принцип обратной связи.
Рассмотрим эти принципы более подробно.