

16. Кинематика зубчатых механизмов. Передаточное число и передаточное отношение.
Самое широкое применение в машинах и приборах находят зубчатые механизмы.
Трехзвенный зубчатый механизм с неподвижными осями:
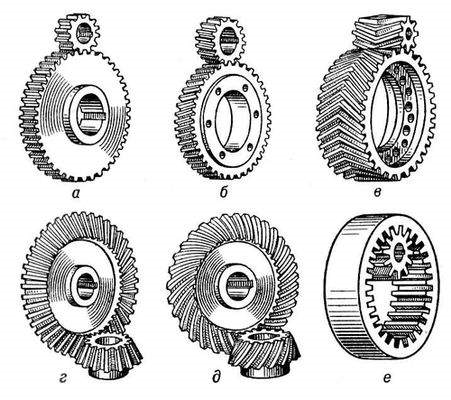
Зубчатая передача с цилиндрическими колёсами: а — прямозубая; б — косозубая; в — шевронная; г — коническая; д — с круговым зубом; е — с внутренним зацеплением.
Если известны радиусы начальных окружностей колёс, то известно и их передаточное отношение , определяемое по формуле:
U12 = ω1\ ω2 = ± r1\r2 = ±z1\z2 = n1\n2,
где ω – угловые скорости, r – радиус, n – частота вращения колёс, z – число зубьев.
При внешнем зацеплении (а) угловые скорости колёс имеют различное направление вращения, то у внешнего зацепления передаточное отношение всегда отрицательное. Наоборот, у внутреннего зацепления (е) передаточное отношение всегда положительное.
Механизм многоступенчатых зубчатых передач с неподвижными осями:
Передаточное отношение сложной многоступенчатой зубчатой передачи есть произведение взятых со своими знаками передаточных отношений отдельных его ступеней.
17. Основные задачи синтеза механизмов.
1) Преобразование вращательного движения вокруг одной оси во вращательное движение вокруг другой оси.
2) преобразование вращательного движения вокруг одной оси в поступательное движение вдоль некоторой заданной прямой и наоборот.
3) преобразование поступательного движения вдоль одной заданной прямой в поступательное движение вдоль другой заданной прямой
4) воспроизведение одной из точек звеньев рычажного механизма требуемой траектории, воспроизведение заданных углов поворота выходного звена, движение выходного звена с остановками.
При решении первых трёх задач обычно задаются требуемые законы движения тех звеньев, между которыми осуществляется передача движения. При решении четвёртой задачи требуется траектория аналитически ( в виде уравнений) или графически (отдельными точками, лежащими на заданной траектории).
18. Основная характеристика редуктора.
Редуктор - передаточный механизм, который служит для понижения частоты вращения, увеличения вращающего момента, иногда изменения пространственной ориентации элементов, выполнен в виде отдельного агрегата.
1)передаточное число U=nб/nт Отношение оборотов быстроходного вала к тихоходному;
2)номинальный вращающий момент на тихоходном валу;
3)КПД;
4)Габаритные размеры и масса.
19. Структурная группа (группа Ассура). Классификация структурных групп.
Группа Ассура – это кинематическая цепь с нулевой степенью подвижности относительно тех звеньев, к которым она присоединяется своими элементами и которые не распадаются на более простые кинематические цепи с нулевой степенью подвижности.
Различные сочетания количества звеньев и кинематических пар дают возможности получать различные варианты структурных групп.
В пределах класса (по Ассуру) группы подразделяются по числу поводков на порядки (порядок группы равен числу ее поводков). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп. Особенность структурных групп Ассура - их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая ферма. Используя группы Ассура удобно проводить структурный, кинематический и силовой анализ механизмов. Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 1-го класса 2-го порядка.