

§6. Класіфікацыя рухаў плоскасці. Групы рухаў.
Пункт з’яўляецца інварыянтным пры руху f толькі тады, калі M’(x’, y’)=f(M)=M(x, y), г. зн. калі
x' x
y' y
З аналітычных выразаў руху будзе
x(1 cos ) y sin x0
x sin (1 cos ) y y0
Адносна x і y гэта есць лінейная сістэма двух раўнанняў. Даследуем яе па формулах Крамера.
Асноўны вызначальнік сістэмы
1 cos
sin
sin
1 cos
1 cos cos cos2 sin 2
(1 cos )(1 ) 2(1 ) sin 2
2
Разгледзім спачатку класіфікацыю рухаў першага роду, г. зн. калі =1. Магчымы выпадкі:
1) 0 0 i' i
Сістэма раўнанняў (1) мае адзінае рашэнне x= x1 ,
y y1
. Рух мае адзін інварыянтны
пункт
M1 (x1 , y1 ) . Легка ўпэўніцца, што рух з’яўляецца паваротам плоскасці вакол пункта
M 1 на вугал .
2) 0 0; i' i, j' j
З аналітычных выразаў руху атрымаем
x' x x0
y' y y0
Значыць, рух з’яўляецца паралельным пераносам.
Аналагічна можна даказаць, што рухі другога роду могуць быць толькі восевай сіметрыяй, ці слізготнай сіметрыяй.
Абазначым праз P- мноства ўсіх рухаў плоскасці. На падставе азначэння руху маем f, g
P g f P і
f P f 1 P
. Такім чынам, P- гэта падгрупа групы G усіх
пераўтварэнняў плоскасці. Яна называецца групай рухаў. Асноўным яе інварыянтам з’яўляецца адлегласць паміж пунктамі.
15 Відавочна, што мноства P
yсіх рухаў першага роду есць падгрупа групы P усіх рухаў.
Яе асноўны інварыянт- гэта арыентацыя вугла.
Мноства ўсіх паралельных пераносаў з’яўляецца падгрупай групы рухаў.Напрамак есць
яе асноўны інварыянт.
Падгрупай групы
, а таму і групы , з’яўляецца і мноства ўсіх паваротаў плоскасці
вакол пункта
М 0 . Асноўны інварыянт – гэта адлегласць ад цэнтра павароту
М 0 .
Мноства рухаў другога роду групу не ўтварае.
§ 7. Гаматэтыя і яе ўласцівасці.
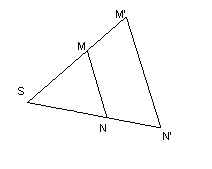
Няхай дадзены пункт S і сапраўдны лік k≠0. Разгледзім адлюстраванне плоскасці на
сябе па закону
SM ' k SM , дзе M’ – гэта вобраз пункта M. Яно з’яўляецца
пераўтварэннем плоскасці і называецца гаматэтыяй. Пункт S называецца цэнтрам, а лік k –
каэфіцыентам гаматэтыі. Калі k>0 , то гаматэтыя называецца дадатнай, а пры k<0 –
H
s
гаматэтыі есць інварыянтны пункт і пры
k>0.
k 1
іншых інварыянтных пунктаў няма. Няхай
K K
N ' H S ( N ) , M ' H S (M )
M ' N ' SN ' SM ', M ' N ' k MN
SN ' k SN , SM ' k SM ;
Аналаічна і для k<0.
Такім чынам, гаматэтыя ўсялякі вектар MN памнажае на каэфіцыент гаматэтыі k. Карыстаючыся гэтым, можна пераканацца, што гаматэтыя захоўвае стасунак, у якім
пункт дзеліць накіраваны адрэзак. Таму гаматэтыя пераводзіць адрэзак у адрэзак, прамень
у прамень, прамую ў прамую, паўплоскасць у паўплоскасць, вугал у вугал. Кожная прамая, якая праходзіць праз цэнтр гаматэтыі, інварыянтна. Дадатная гаматэтыя захоўвае любы напрамак, а адмоўная змяняе яго на процілеглы.
H
s
 k
k
SM ' k SM
. Калі
H S (M ) M " , то
SM " k SM . Адсюль маем
SM ' SM " .
Значыць, пункты M’ і M” сіметрычныя адносна цэнтра S гаматэтыі, прычым для любога
k
пункта M плоскасці
M ' Z S ( M " )
, M ' Z S H S (M )
для
M . Значыць,
k k
H S Z S H S .
k
Такім чынам, адмоўная гаматэтыя H s з’яўляецца кампазіцыяй дадатнай гаматэтыі з
тым жа цэнтрам S і каэфіцыентам k і цэнтральнай сіметрыі Z S адносна пункта S.