

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Петербургский государственный университет путей сообщения
Императора Александра I»
(ФГБОУ ВО ПГУПС)
Факультет «Транспортные и энергетические системы»
Кафедра «Подъёмно-транспортные, путевые и строительные машины»
Специальность 23.05.01 «Наземные транспортно-технологические средства»
Специализация «Подъёмно-транспортные, строительные, дорожные средства и оборудование»
Курсовой проект
по дисциплине
«Управление техническими системами»
Форма обучения – очная
Вариант 33
|
Выполнил обучающийся Курс 3 Группа ПТМ-613
|
__________________ подпись, дата |
Сызранов И.Ю. |
|
|
|
|
|
|
|
Панченко М.Н. |
|
Руководитель
|
__________________ подпись, дата |
|
Санкт-Петербург
2018
Введение…………………………………………………….…………………………3
1. Исходные данные…………………………………………………………………..……..4
2.1. Разработка структурной схемы САУ…………..……..…………………………….......4
2.2. Определение мощности привода объекта управления, выбор электродвигателя и редуктора, составление передаточных функций ………............................................................7
2.3. Выбор параметров усилителя мощности для исполнительного механизма, составление передаточной функции …………………………………....................................................8
2.4. Выбор параметров датчика системы и механической передачи привода датчика …………………………..…………………………………………......................................8
2.5. Составление общей передаточной функции САУ, определение передаточного коэффициента электронного усилителя………..……….………..................................................9
2.6. Составление характеристического уравнения и оценка устойчивости САУ по алгебраическому критерию ……………………….……………....................................................10
2.7. Оценка устойчивости САУ по частотному критерию……...…..............................11
2.8. Оценка запаса устойчивости по логарифмическим частотным характеристикам САУ………………………………….................................................................................12
3. Список литературы …………………………………………………...………………16
4. Приложения
Введение
Цель курсового проекта - закрепление студентами знаний по теории систем автоматического управления (САУ) и выработка практических навыков по исследованию устойчивости линейных САУ.
Задачами курсового проекта являются:
-
Разработка структурной схемы следящей САУ для заданного варианта функциональной схемы.
-
Определение мощности привода объекта управления, выбор электродвигателя и редуктора, составление передаточных функций.
-
Выбор параметров усилителя мощности для исполнительного механизма, составление передаточной функции.
-
Выбор параметров датчика системы и механической передачи привода датчика.
-
Составление общей передаточной функции САУ, определение передаточного коэффициента электронного усилителя.
-
Составление характеристического уравнения и оценка устойчивости САУ по алгебраическому критерию.
-
Оценка устойчивости САУ по частотному критерию.
-
Оценка запаса устойчивости по логарифмическим частотным характеристикам САУ.
1. Исходные данные
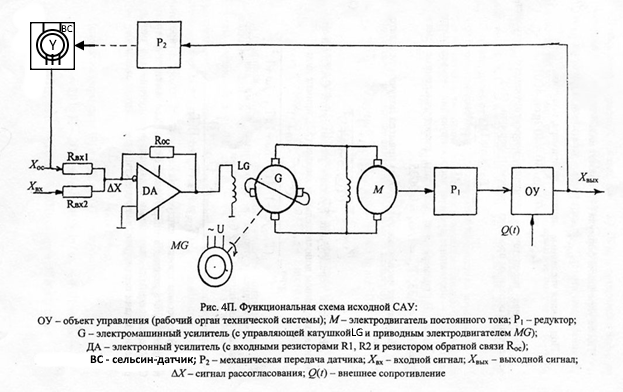
Функциональная схема исходной САУ:
-
Величина перемещения ОУ, φ=2,2 рад
-
Угловая скорость ОУ, ω=1,8 рад/с
-
Приведенный момент ОУ, M=3,2 кг*м2
-
Линейное ускорение, ε=12 рад/с2
-
Внешняя нагрузка при угловом движении, M=20 Н*м
-
Погрешность позиционирования угловая, ∑= 0,01 рад
2.1. Разработка структурной схемы САУ
В курсовом проекте предусматривается разработка графической структурной схемы САУ, функциональной схемы исходной САУ.
В исходной функциональной схеме САУ объект управления (ОУ) является аналогом таких реальных технических устройств, как рабочий орган грузоподъемного крана, путевой машины, строительного манипулятора, других механизмов и машин,
Выходной параметр системы Хвых задается как угловое перемещение (φ, рад), объекта управления.
Средние значения величины выходного параметра системы Хвых, величины Qt внешнего сопротивления движению ОУ (силы F, Н, или момента М, Н•м) задаются.
Движущее силовое воздействие на ОУ в системе осуществляется исполнительным механизмом (ИМ), который представлен усилителем мощности (электромашинным усилителем постоянного тока G), электродвигателем М (постоянного тока с параллельной обмоткой возбуждения) и механическим редуктором Р1.
Задаваемая величина рабочего хода объекта управления определяется величиной входного сигнала Хвх системы управления. В исходной функциональной схеме САУ использованы электрические входные сигналы постоянного тока Хвх, В.
Контроль величины выходного сигнала (осуществление обратной связи в системе управления) выполняется измерительным органом, состоящим из датчика перемещения (сельсина ВС) и механической передачи Р2.
На выходе датчика формируется электрический сигнал обратной связи ,Xос, имеющий одинаковую размерность с входным сигналом Xвх, В.
Управляющим органом САУ является электронный суммирующий усилитель ДА, выполняющий алгебраическое сравнение сигналов Xвх и Xос и формирующий сигнал рассогласования ∆Х, В (реальный управляющий сигнал). С выхода ДА усиленный сигнал рассогласования подается на вход усилителя мощности G.
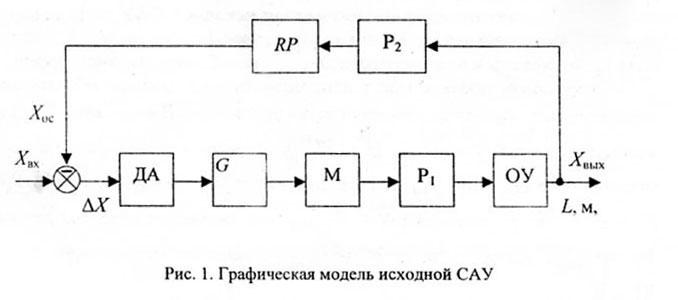
Для исследования исходной САУ, представленной в виде функциональной схемы, составляется графическая схема (пример на рис. 1).
Форма переходного процесса САУ определяется формой входного сигнала в функции времени Xвх(t) (скачкообразная или гармоническая).
Исходное состояние системы соответствует нулевому значению величины входного сигнала Xвх(t) = 0. При этом выходной сигнал также имеет значение Хвых (t) = 0.
Если входной сигнал скачкообразно принимает постоянное значение Xвх > 0 то начинается и продолжается угловое движение объекта управления ОУ до тех пор,
пока величина перемещения (φ) не сравняется с величиной, соответствующей заданному постоянному значению входного сигнала.
Если входной сигнал имеет гармоническую форму Хвх (t) = Хвх sinω•t (где Xвх –постоянная амплитуда; ω - круговая часта изменения входного сигнала), то выходной сигнал Хвых (t) также будет изменяться по гармоническому закону.
В реальной САУ. обладающей инерционностью, конечное позиционирование ОУ происходит с ошибкой, зависящей от свойств системы. Теоретически предполагается, что значению входного сигнала Хвх будет соответствовать величина выходного сигнала Хвых. однако фактический выходной сигнал будет иметь величину Хвых±∑ где ∑ - ошибка позиционирования.
Конкретная цель курсового проекта - установить, обладает ли устойчивостью исходная САУ, если при установленных заданным параметрах позиционирование объекта происходит с ошибкой, не превышающей заданного значения.
Для создания математической модели исходной САУ ее физические элементы, показанные в графической структурной схеме на рис. 2, должны быть представлены в виде передаточных функций в операторной форме.
В курсовом проекте могут использоваться следующие обозначения передаточных функций:
электронный усилитель ДА - как W(р)ДА;
электромашинный усилитель G - W(р)G;
электродвигатель М - W(р)М;
редуктор Р1 W(р)P1 ;
объект управления ОУ - W(р)ОУ;
механическая передача датчика Р2– W(р)Р2;
потенциометрический датчик RP - W(р)RP
Все исходные САУ относятся к системам с отрицательной обратной связью, поэтому их структурные схемы являются замкнутыми (см. рис. 2).
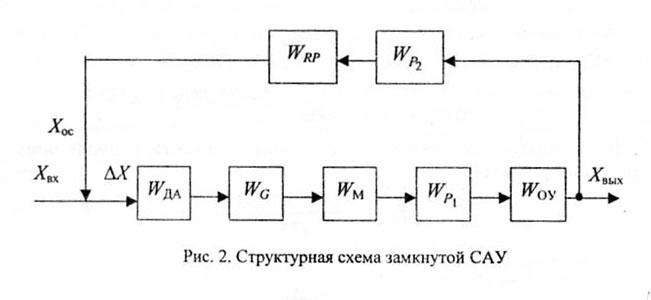
Общая передаточная функция замкнутой исходной САУ составляется из передаточных функций элементов в виде уравнения:

(1)
При решении ряда задач по оценке устойчивости требуется составлять передаточную функцию разомкнутой САУ. Для этого в графической замкнутой структурной схеме разрывается линия обратной связи между датчиком и электронным усилителем, и все элементы выстраиваются в одну цепочку, как показано на схеме рис. 3.

Общая передаточная функция разомкнутой системы составляется из уравнения 1 в следующем виде:
 (2)
(2)
2.2. Определение мощности привода объекта управления, выбор электродвигателя и редуктора, составление передаточных функций
Так как объект управления (ОУ) совершает угловое перемещение, то мощность привода определяется по формуле (3):
 (3)
(3)
где Р0У - мощность привода ОУ, кВт;
КЗ - коэффициент запаса мощности, К3 = 2;
F- сила сопротивлении движению, Н;
m – приведенная масса, кг;
a– ускорение разгона, м/с2;
V – линейная скорость, м/с;
η-КПД, η =0,7...0,9.
Выбор электродвигателей постоянного тока и переменного трехфазного тока производится по условию:
 ,
(4)
,
(4)
где РМ - мощность электродвигателя, кВт.
Выбираем электродвигатель постоянного тока МИ-31 со следующими параметрами:
Мощность РМ=0,45кВт;
Частота вращения n=3000об/мин;
Напряжение питания U=110В;
Передаточный коэффициент КМ=27;
Постоянная времени ТМ=0,08 с.
В курсовом проекте электродвигатели математически моделируются в виде типовых инерционных звеньев автоматики с передаточной функцией:
 (5)
(5)
где р - дифференциальный оператор, р=d/dt;
Редуктор Р1, передающий движение от электродвигателя М к объекту управления ОУ, моделируется в виде безынерционного типового звена автоматики, имеющего передаточную функцию:
 (6)
(6)
где КР1- передаточный коэффициент
Величина передаточного коэффициента определяется по формуле
 (7)
(7)
где ω - угловая скорость, рад/с;
n-частота вращения электродвигателя, об/мин.
Объект управления ОУ моделируется в виде безынерционного звена автоматики с передаточной функцией:
 ,
(8)
,
(8)
Принимается К0У = 1.
2.3. Выбор параметров усилителя мощности для исполнительного механизма, составление передаточной функции.
Для питания электродвигателя постоянного тока применяется электромашинный усилитель G (с управляющей обмоткой LG), который подбирается по двум параметрам - номинальному выходному напряжению UG , В, и выходной мощности PG, кВт, при условии:
UG=UM; PG≥PM
Мощность электродвигателя постоянного тока PM=0,12кВт, напряжение питание UM=110В. Принимаем Электромашинный усилитель типа ЭМУ-5А с параметрами: PG=0,5кВт, UG=110В, передаточный коэффициент KG=5,4; постоянные времени T1G=0,03, T2G=0.04.
При составлении передаточной функции электромашинный усилитель моделируется инерционными звеньями по входу и выходу. Передаточная функция имеет вид:
 (9)
(9)
Для конкретного усилителя в рассматриваемом примере передаточная функция примет вид:
2.4. Выбор параметров датчика системы и механической передачи привода датчика.
Сельсин-датчики RP выбираются по справочному приложению. Для каждого датчика приводятся параметры: тип датчика, передаточный коэффициент KRP, погрешность измерения δRP, м.
Сельсин моделируется в виде безынерционного типового звена с передаточной функцией:
 ,
(10)
,
(10)
Выбираем датчик БД - 501 с параметрами:
-
передаточный коэффициент KRP=25;
-
погрешность измерения δдат=0,005 рад.
В исходных данных для курсового проекта по всем вариантам указывается погрешность позиционирования объекта управления: ∑, м, - линейного движения.
Допускаемая погрешность датчика δдоп должна быть согласована с погрешностью позиционирования САУ и вычислена по формуле
 .
(11)
.
(11)
Если
выполняется условие δдат
 δдоп,
то датчик может использоваться без
механической повышающей передачи Р2.
Если условие не выполняется, то необходимо
определить параметры повышающей
передачи, чтобы обеспечить допускаемую
погрешность измерения.
δдоп,
то датчик может использоваться без
механической повышающей передачи Р2.
Если условие не выполняется, то необходимо
определить параметры повышающей
передачи, чтобы обеспечить допускаемую
погрешность измерения.
Проверяем: 0,005м. > 0,002м. Условие не выполняется, необходимо определить параметры повышающей передачи.
Повышающая механическая передача модулируется в виде безынерционного типового звена с передаточной функцией:

Величина передаточного коэффициента определяется по формуле

Где δР2 – погрешность механической передачи. В курсовом проекте может быть принято: δР2 = 0,00001…0,00005 м – для линейного движения.