

-
Получение в Simulink для системы с пид регулятором
устойчивого/неустойчивого состояния системы управления.
См вопрос 28.
-
Устранение в системе с пид регулятором статической ошибки.
См вопрос 29.
-
Методика настройки пид регулятора.
Параметры регулятора настраиваются по виду переходного процесса на единичное задающее воздействие. При очередной смене коэффициентов строится переходной процесс и анализируется его вид. Методика настройки заключается в следующем:
-
Отключить интегральную и дифференциальную составляющие регулятора.
-
Постепенно увеличивая коэффициент пропорциональной составляющей найти предельное значение, при превышении которого система становится неустойчивой.
-
Уменьшая коэффициент пропорциональной части получить устойчивую систему с затухающим переходным процессом со следующими показателями качества- перерегулирование 20-30%, количество колебаний 1.5-2. При этом возможно наличие остаточной ошибки.
-
Подключается интегральная составляющая с малым значением коэффициента.
-
Постепенно увеличивая коэффициент интегральной составляющей добиваются получения переходного процесса с постоянными или медленно расходящимися колебаниями.
-
Подключают дифференциальную составляющую с малым коэффициентом и постепенно увеличивая его, получить устойчивый затухающий переходной процесс с 1.5-2 колебаниями и перерегулированием 20-30%.
-
Увеличивая дифференциальную составляющую попытаться уменьшить время регулирования при тех же перерегулировании и количестве колебаний переходного процесса.
Показать методику настройки регулятора методом моделирования в Simulink
-
Введение в нелинейные системы управления. Существенные отличия от линейных.
К нелинейным системам относятся системы при наличии элементов с существенными нелинейностями типа релейной характеристики, зоны нечувствительности, зоны насыщения и др.
В линейных системах при положительных корнях системы имеют место расходящиеся неустойчивые колебания системы, которые при разработке системы стараются исключить. На мощности элементов систем ограничены, и расходящиеся колебания имеют ограничения. При этом появляются нелинейные эффекты. Кроме того, нелинейные системы создаются целенаправленно. Например, релейные системы просты и часто позволяют добиться приемлемых результатов. Эти особенности требуют применения других методов анализа систем.
Н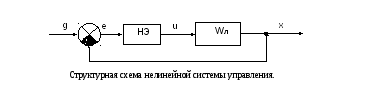 елинейные
системы при анализе приводятся к типовой
структурной схеме, включающей нелинейный
элемент и один линейный элемент, к
которому приводятся все линейные
элементы системы. Методика анализа
заключается в следующем:
елинейные
системы при анализе приводятся к типовой
структурной схеме, включающей нелинейный
элемент и один линейный элемент, к
которому приводятся все линейные
элементы системы. Методика анализа
заключается в следующем:
-
Составляются уравнения отдельных элементов с линеаризацией несущественных нелинейностей.
-
Составляется структурная схема системы.
-
Преобразуется структурная схема и выделяются линейная и нелинейная части.
-
Производится анализ системы.
При анализе удобно выбирать в качестве выходных переменных воздействия, поступающие на вход нелинейного элемента.
Основные задачи исследования нелинейных систем.
-
Отыскание возможных состояний равновесия и исследование их устойчивости.
-
Выявление периодических движений, определение их параметров, анализ устойчивости.
-
Исследование переходных процессов из начальных точек к равновесным состояниям или автоколебательным.
-
Исследование точности системы.
-
– 42. Типовые нелинейности. Математическая модель релейного элемента без зоны нечувствительности без гистерезиса и с гистерезисом, с зоной нечувствительности без гистерезиса, с гистерезисом.
