

4.3 Способы описания технологических процессов.
Способы описания технологических процессов или объектов существенны для построения информационно-управляющей вычислительной системы.
Особая роль при этом отводится математическому обеспечению (математическим моделям) для удобства управления по собранной информации-контуры оперативного и диспетчерского управления(на уровне тактического управления).
Графические средства описания особенно существенны при визуализации объекта в процессе интерактивного взаимодействия, т.к. как бы не называлась системы (АСУ, АСУТП, ИС, ИТУ и т.д.) – это всегда человеко-машинный комплекс, осуществляющий функции управления.
Обобщенная схема описания технологических процессов имеет вид:

Рис. 4.4.
1.Словесный – язык, на котором разговаривает технолог, используется для описания работы в регламенте. Регламент- это документ (инструкция), в котором описывается вся работа объекта с учетом участия человека, всех приборов и материалов, и норм безопасности, а также определяются действия персонала по управлению.
2. Графический способ – описывается работа объекта на основе условных графических обозначений (УГО), принятых для отдельных блоков- агрегатов.
Пример 1: ТЭЦ – тепловой энергоблок.
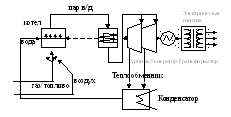
Рис. 4.5. Технологическая структура теплового энергоблока
Примечание: часть пара и горячей воды может также отдаваться потребителям (например, с целью отопления квартир)
Графический способ описания (см. рис. 4.5) обычно имеет различную степень подробности (в зависимости от назначения). Так в проектной документации должны быть указаны подробно все блоки, потоки вещества, энергии, измерительные и управляющие элементы, исполнительные органы аварийного переключения, пуска и останова и др.
С другой стороны, на микросхемах сенсорного блока УСОД важно отобразить важнейшие параметры объекта на основе упрощенной технологической схемы, исключительно с целью контроля и управления, для чего информационная составляющая может быть совмещена с графическим образом объекта (разными цветами можно, например, отобразить результат диагностической оценки, состояние: зеленый/норма, красный/выше нормы, синий/ниже нормы). Универсальные свойства такой графической интерпретации могут быть осуществлены при использовании специальных мониторов, соединенных с ИС. Их можно оперативно менять и даже иметь несколько вариантов графического отображения объекта. Такие варианты хранятся в специальных графических базах данных – ГБД.
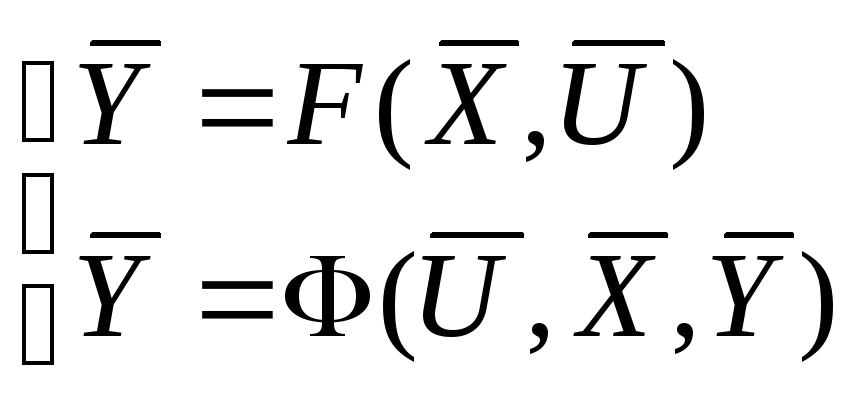
Математический способ описания объектов управления, предполагает построение системы моделей для описания стационарных (статика) и динамических режимов.
В обозначениях рис. 1.1 соответствующие модели имеют вид:
|
|
- в явном виде |
|
- в неявном виде |
Эти модели отражают установившиеся состояния (t→∞) и обычно описываются системой алгебраических линейных уравнений. Для пространственно-распределенных объектов вид модели (l – пространственная координата):
|
|
|
|
,при l=0 (или l=L) |

Нестационарные режимы, как правило, описываются системами нелинейных дифференциальных уравнений в обыкновенных либо частных производных:
![]() либо
либо
![]() ,
с соответствующими начальными, либо
граничными условиями.
,
с соответствующими начальными, либо
граничными условиями.
Для решения подобных систем предполагается
использование широкого спектра численных
методов в рамках вспомогательного
вычислительного блока «Моделирование
и идентификация». Необходимость
идентификации моделей вытекает из
свойства «неоднозначности» сложных
объектов и весьма удобно реализовать
в рамках ИУС, особенно, если модели
содержат некоторые свободные параметры
![]() ,
которые могут уточняться по имеющейся
в системе информации путем решения так
называемых обратных задач.
,
которые могут уточняться по имеющейся
в системе информации путем решения так
называемых обратных задач.
Тогда соответствующие модели имеют вид:
![]()
![]()
![]()
Здесь везде
![]() -вектор
идентифицируемых параметров по
результатам решения соответствующих
обратных задач.
-вектор
идентифицируемых параметров по
результатам решения соответствующих
обратных задач.