

Электропневматический позиционер
1. Электропневматические позиционеры ППР-1,6-15, ППР-3-15, ППР-10-15 и ППР-20-15 предназначены для преобразования унифицированного сигнала 4…20 ма в угол поворота вала пневмопривода на величину 90°. В состав позиционера входит поворотный пневмопривод. Позиционеры применяются в контурах регулирования расхода жидких или газовых потоков. При этом выходной вал пневмопривода должен быть соединен с поворотным запорным органом (поворотная задвижка, шаровый кран и пр.). По требованию заказчика позиционер может быть укомплектован запорным органом с необходимыми характеристиками. На рис. 1 изображена структурная схема позиционера. Электропневматический преобразователь 1 преобразует 4 — 20 ма в пневматический пропорциональный сигнал, который поступает в мембранную камеру 2. Шток 3 мембранной камеры воздействует на рычаг 4 с пружинным шарниром 5. Рычаг 4 управляет работой сопел 6 и 7, которыесвязаны с дросселями 8 и 9. Давление в соплах управляет работой пневмоблока 10, выходные каналы которого связаны с силовыми камерами 11 и 12 поворотного привода 13. Равновесие на рычаге 4 достигается за счет работы пружины обратной связи 14, один конец которой через гибкий элемент связан с валом 15 пневмопривода.


Технические характеристики
1. Давление воздуха питания, МПа - 0,25 … 0,6 2. Расход воздуха питания в установившемся режиме не более 0,6 м3/ч.
3. Класс точности
–
2,5.
4. Предел допускаемой основной
погрешности ± 2,5% от величины полного
настроенного угла поворота пневмопривода.
5.Вариация- 2,5%.
6. Порог чувствительности
(зона нечувствительности) не превышает
20 % абсолютного значения предела
допускаемой основной погрешности.
7.
Внутренний диаметр трубок для линий
пневмопривода должен быть не менее 6
мм.
8. Температура окружающей среды,
°С
- -30 … +60.
9. Позиционер с пневмоприводом
устойчив к воздействию вибраций в
диапазоне частотой от 5 до 35 Гц с амплитудой
смещения до 0,3 мм.
 10.
Максимальные крутящие моменты при
давлении питания 0,6 МПа
-
ППР 1,6-15
- 35 Нм;
- ППР
3-15
- 77 Нм;
- ППР
10-15
- 216 Нм;
- ППР
20-15
- 432 Нм.
10.
Максимальные крутящие моменты при
давлении питания 0,6 МПа
-
ППР 1,6-15
- 35 Нм;
- ППР
3-15
- 77 Нм;
- ППР
10-15
- 216 Нм;
- ППР
20-15
- 432 Нм.
Практическая часть
1.Прямая задача. Расчет мдс, силы тока электродвигателя.
Площадь сечения
![]() ,
,
![]() .
.
Полная магнитная
индукция
![]() ,
,
![]() .
.
Полный поток
магнитной индукции
![]() ,
,
![]() .
.
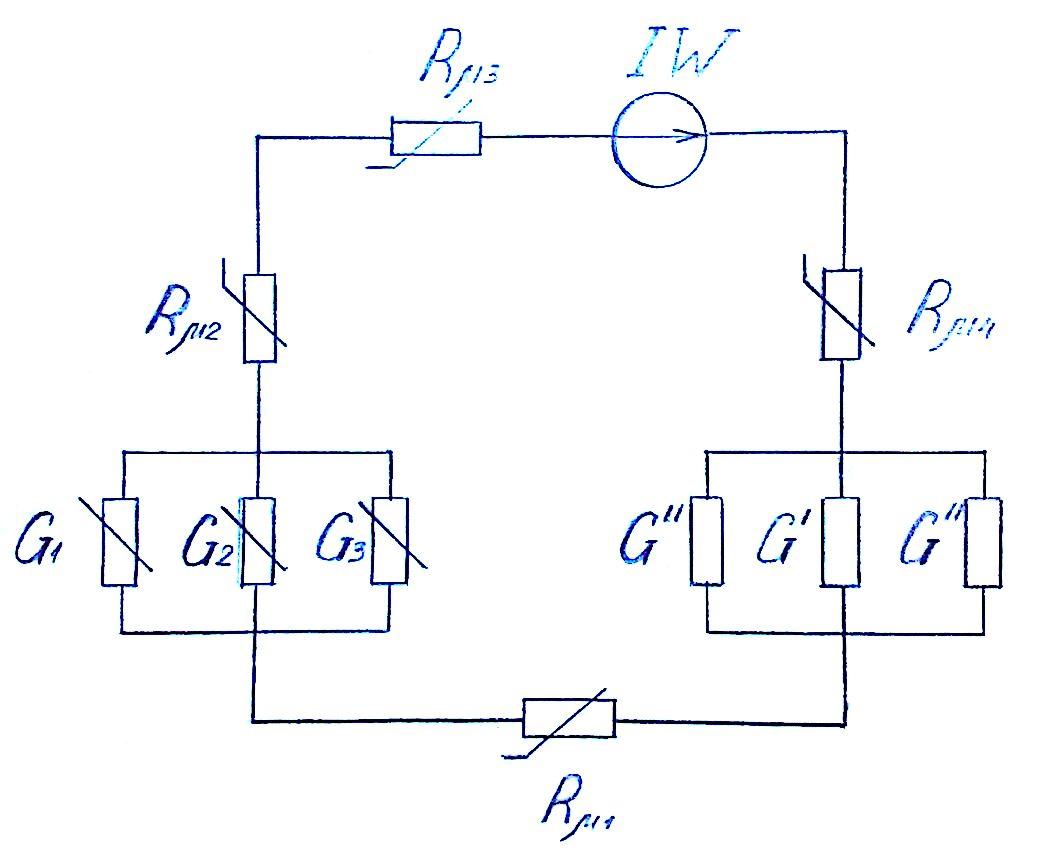
Схема замещения электродвигателя. Здесь Rμ1, Rμ2, Rμ3, Rμ4 – магнитные сопротивления,
G1, G2, G3, G4, G’, G’’ – электромагнитные проводимости, IW – магнитодвижущая сила.
Сопротивления выпучивания найдем через магнитную проводимость
![]()
1) на переменном
зазоре  ,
,
где
![]() ;
;
![]() ,
из графика изменения удельной магнитной
,
из графика изменения удельной магнитной
проводимости
![]() ;
;
 .
.
![]() ,
,
где
![]() ;
;
![]() ;
;
 ;
;
![]() ;
;
![]() .
.
 ,
,
где
![]() ;
;

![]() ;
;
![]() ,
из графика изменения удельной магнитной
,
из графика изменения удельной магнитной
проводимости
![]() ;
;
 .
.
Полная проводимость на переменном зазоре
![]() .
.
Сопротивление
выпучивания
![]() ,
,
![]() .
.
2)на постоянном
зазоре
 .
.
 ,
,
где
![]() ;
;
![]() ;
;
![]() ,
из графика изменения удельной магнитной
,
из графика изменения удельной магнитной
проводимости
![]() ;
;
 .
.
Полная проводимость на постоянном зазоре
![]() .
.
Сопротивление
выпучивания
![]() .
.
Длина средней линии
 ,
,

![]() ;
;![]()
![]() ;
;
 .
.
Магнитные сопротивления участков
1)
![]() ,
,
![]() ,
где напряженность Н1
находится из кривых намагничивания,
,
где напряженность Н1
находится из кривых намагничивания,
 ;
;
2)![]() ,
,
![]() ,
,
 ;
;
3)
![]() ,
,
![]() ,
,
 ;
;
4)
![]() ,
,
![]() ,
,
 .
.
Общее сопротивление цепи
![]() .
.
Магнитодвижущая сила
![]() .
.
 Сила
тока
Сила
тока
![]() .
.
Индуктивность
 .
.
Площадь поперечного сечения провода меди Sпров.
Длина провода
![]()
где
![]() - число витков электромагнита,
- число витков электромагнита,
![]() диаметр одного
витка катушки.
диаметр одного
витка катушки.
![]()
![]()
где
![]() -
удельная электропроводимость меди.
-
удельная электропроводимость меди.
откуда
![]() ,
,
![]()
![]() .
.
Площадь меди
![]() .
.
Площадь катушки
![]() .
.