

12.4. Регулирование частоты вращения асинхронных двигателей. Реверсирование асинхронного двигателя
Из формулы (12.2) получим
![]() .
(12.11)
.
(12.11)
Из формулы (12.11) видно, что частоту вращения асинхронного двигателя можно менять тремя способами:
-
изменением частоты питающего напряжения;
-
изменением числа полюсов двигателя. Для этого в пазы статора закладывают обмотку, которую можно переключать на различное число полюсов;
-
изменением скольжения. Этот способ можно применить в асинхронных двигателях с фазным ротором. Для этого в цепь ротора включают регулировочный реостат. Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения от Sa к Sг (см. рис. 12.5), а, следовательно, и к уменьшению частоты вращения двигателя.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения. Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
12.5. Однофазные асинхронные двигатели
Однофазный двигатель имеет одну обмотку, расположенную на статоре. Однофазная обмотка, питаемая переменным током, создаст пульсирующее магнитное поле. Поместим в это поле ротор с короткозамкнутой обмоткой. Ротор вращаться не будет. Если раскрутить ротор сторонней механической силой в любую сторону, двигатель будет устойчиво работать. Объяснить это можно следующим образом. Пульсирующее магнитное поле можно заменить двумя магнитными полями, вращающимися в противоположных направлениях с синхронной частотой n1 и имеющими амплитуды магнитных потоков, равные половине амплитуды магнитного потока пульсирующего поля. Одно из магнитных полей называется прямовращающимся, другое - обратновращающимся. Каждое из магнитных полей индуктирует в роторной обмотке вихревые токи. При взаимодействии вихревых токов с магнитными полями образуются вращающие моменты, направленные встречно друг другу. На рис. 12.7 изображены зависимости момента от прямого поля М', момента от обратного поля М" и результирующего момента М в функции скольжения М = М' - M".
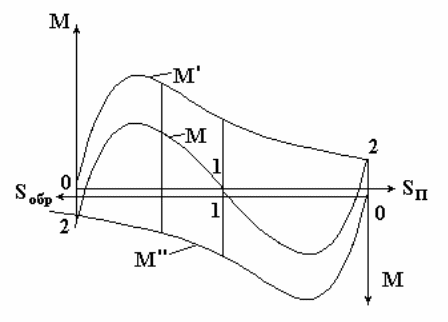 Рис.
12.7
Рис.
12.7
Оси скольжений направлены встречно друг другу. В пусковом режиме на ротор действуют вращающие моменты, одинаковые по величине и противоположные по направлению. Раскрутим ротор сторонней силой в направлении прямовращающегося магнитного поля. Появится избыточный (результирующий) вращающий момент, разгоняющий ротор до скорости, близкой к синхронной. При этом скольжение двигателя относительно прямовращающегося магнитного поля
![]() .
.
Скольжение двигателя относительно обратновращающегося магнитного поля
![]() .
.
Рассматривая результирующую характеристику, можно сделать следующие выводы:
1. Однофазный двигатель не имеет пускового момента. Он будет вращаться в ту сторону, в которую раскручен внешней силой. 2. Из-за тормозного действия обратновращающегося поля характеристики однофазного двигателя хуже, чем трехфазного.
Для создания пускового момента однофазные двигатели снабжают пусковой обмоткой, пространственно смещенной относительно основной, рабочей обмотки на 90o. Пусковая обмотка подключается к сети через фазосдвигающие элементы: конденсатор или активное сопротивление.
|
|
На рис. 12.8 показана схема включения обмоток двигателя, где Р - рабочая обмотка, П - пусковая обмотка. Емкость фазосдвигающего элемента С подбирают таким образом, чтобы токи в рабочей и пусковой обмотках различались по фазе на 90o. Трехфазный асинхронный двигатель может работать от однофазной сети, если подключить его обмотки по следующим схемам.(Рис. 12.9) |
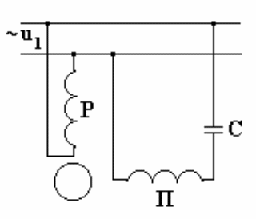 Рис.
12.8
Рис.
12.8
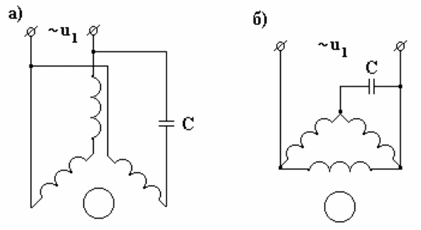 Рис.12.9
Рис.12.9
В схеме на рис. 12.9а статорные обмотки соединены звездой. В схеме на рис. 12.9б статорные обмотки соединены треугольником. Величина емкости С ≈ 60 мкф на 1 кВт мощности.