

§15. Парабола
Параболой
называется геометрическое место точек
на плоскости, равноудалённых от заданной
точки, называемой фокусом,
и заданной прямой, называемой директрисой.
Пусть
![]() –
фокус. Ось Ox
проведём через
–
фокус. Ось Ox
проведём через
![]() перпендикулярно директрисе (рис. 26).
перпендикулярно директрисе (рис. 26).
П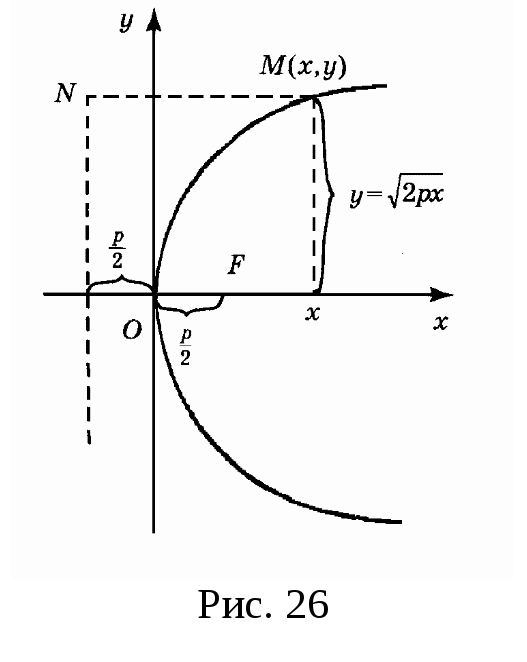 усть
усть
![]() –
расстояние от фокуса
–
расстояние от фокуса
![]() до директрисы. Это число задано и
называется параметром
параболы.
Начало координат возьмём в середине
перпендикуляра, опущенного из точки
до директрисы. Это число задано и
называется параметром
параболы.
Начало координат возьмём в середине
перпендикуляра, опущенного из точки
![]() на директрису. Тогда фокус будет иметь
координаты
на директрису. Тогда фокус будет иметь
координаты
![]() .
Директриса имеет уравнение
.
Директриса имеет уравнение
![]() .
Пусть
.
Пусть
![]() – произвольная точка параболы,
– произвольная точка параболы,
![]() – основание перпендикуляра, опущенного
из точки
– основание перпендикуляра, опущенного
из точки
![]() на директрису. Из рис. 26 видно, что
расстояние
на директрису. Из рис. 26 видно, что
расстояние
![]() . (45)
. (45)
Запишем расстояние
от
![]() до
до
![]() :
:
![]() (46)
(46)
Для любой точки
![]() параболы имеем
параболы имеем
![]() (по определению). Подставим сюда выражения
(45), (46) и получим уравнение параболы
(по определению). Подставим сюда выражения
(45), (46) и получим уравнение параболы
![]() .
.
Упростим его, избавляясь от корня. Получим каноническое уравнение параболы
![]() .
(47)
.
(47)
И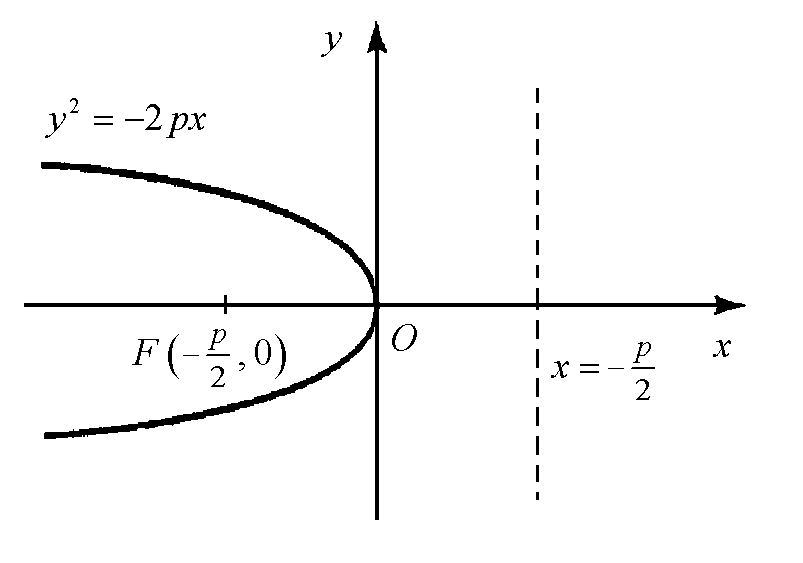 сследуем
форму параболы по уравнению (47). Так как
это уравнение содержит
сследуем
форму параболы по уравнению (47). Так как
это уравнение содержит
![]() только во второй степени, то, как и в
случае эллипса, Ox
является осью симметрии параболы.
Следовательно, вид параболы достаточно
установить в верхней полуплоскости,
где
только во второй степени, то, как и в
случае эллипса, Ox
является осью симметрии параболы.
Следовательно, вид параболы достаточно
установить в верхней полуплоскости,
где
![]() .
Для таких значений
.
Для таких значений
![]() уравнение (47) запишем в виде
уравнение (47) запишем в виде
![]() .
Эта формула выражает ординату точки
.
Эта формула выражает ординату точки
![]() ,
абсцисса которой равна
,
абсцисса которой равна
![]() .
Когда
.
Когда
![]() ,
согласно последней формуле
,
согласно последней формуле
![]() ,
точка
,
точка
![]() совпадает с
совпадает с
![]() .
С увеличением
.
С увеличением
![]() –
абсциссы точки
–
абсциссы точки
![]() – её ордината, равная
– её ордината, равная
![]() ,
неограниченно растёт, и точка
,
неограниченно растёт, и точка
![]() уходит вверх и вправо. В силу симметрии
остальная часть параболы вычерчивается
сразу. Если Ox
провести от
уходит вверх и вправо. В силу симметрии
остальная часть параболы вычерчивается
сразу. Если Ox
провести от
![]() к директрисе, то получим параболу,
изображенную на рис. 27. Легко проверить,
что уравнение параболы в этом случае
будет иметь вид
к директрисе, то получим параболу,
изображенную на рис. 27. Легко проверить,
что уравнение параболы в этом случае
будет иметь вид
![]() Пусть теперь ось Oy
направлена
п
Пусть теперь ось Oy
направлена
п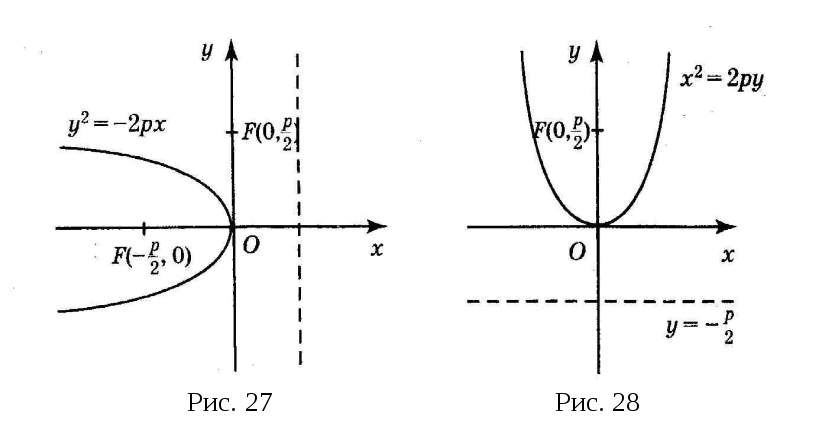 ерпендикулярно
к директрисе и проходит через
ерпендикулярно
к директрисе и проходит через
![]() .
При этом уравнение параболы будет иметь
вид
.
При этом уравнение параболы будет иметь
вид
![]() (см. рис. 28).
(см. рис. 28).
§16. Преобразование координат на плоскости
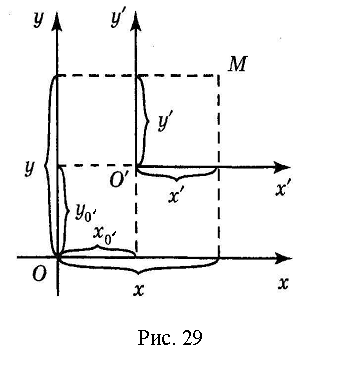
Параллельный
перенос осей координат. Пусть
![]() – исходная система координат,
– исходная система координат,
![]() – новая система координат, полученная
параллельным переносом исходной
системы, как показано на рис. 29.
Положение новой системы по отношению
к старой определим, задав координаты
– новая система координат, полученная
параллельным переносом исходной
системы, как показано на рис. 29.
Положение новой системы по отношению
к старой определим, задав координаты
![]() нового начала
нового начала
![]() в старой системе координат, где
в старой системе координат, где
![]() – заданные числа. Пусть
– заданные числа. Пусть
![]() ,
,
![]() – координаты точки
– координаты точки
![]() в новой системе,
в новой системе,
![]() – координаты точки
– координаты точки
![]() в исходной системе. Как видно из рис. 29,
в исходной системе. Как видно из рис. 29,
![]() ,
,
![]() .
Итак,
.
Итак,
 (48)
(48)
Эти формулы
выражают старые координаты
![]() точки
точки
![]() через её новые координаты.
через её новые координаты.
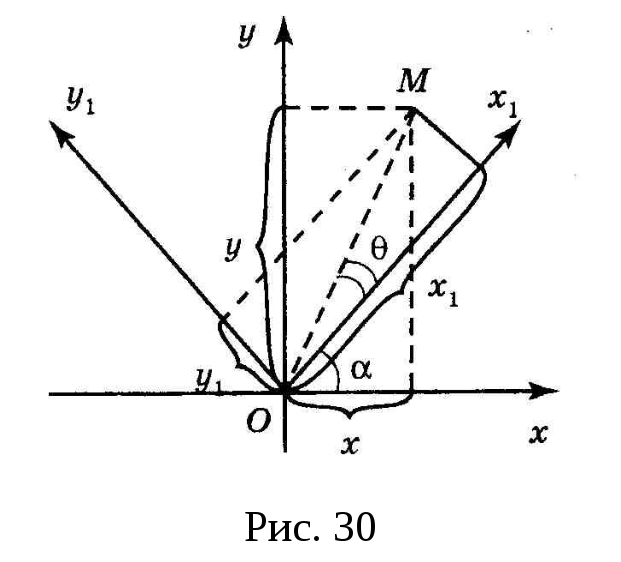
Поворот осей
координат. Пусть
![]() – исходная система координат, а новая
система координат получена поворотом
исходной вокруг начала координат на
угол ,
где
– заданное число (см. рис. 30). Угол
– исходная система координат, а новая
система координат получена поворотом
исходной вокруг начала координат на
угол ,
где
– заданное число (см. рис. 30). Угол
![]() берётся со знаком «+», если отсчёт
ведётся против хода часовой стрелки
от оси Ox.
Пусть
берётся со знаком «+», если отсчёт
ведётся против хода часовой стрелки
от оси Ox.
Пусть
![]() – координаты точки
– координаты точки
![]() в системе
в системе
![]() ,
,
![]() – координаты точки
– координаты точки
![]() в
системе
в
системе
![]() .
Пусть
.
Пусть
![]() и
и
![]() – угол, образованный отрезком
– угол, образованный отрезком
![]() с осью
с осью
![]() ,
причём, как и
,
причём, как и
![]() этот угол берётся со знаком «+», если
отсчёт ведётся от оси
этот угол берётся со знаком «+», если
отсчёт ведётся от оси
![]() против хода часовой стрелки. Из рис. 30
видно, что
против хода часовой стрелки. Из рис. 30
видно, что
![]() (49)
(49)
С другой стороны,
![]() (50)
(50)
Формулы (50)
перепишем, использовав известные
формулы тригонометрии для косинуса и
синуса суммы:
![]()
![]() С учётом (49) запишем
С учётом (49) запишем
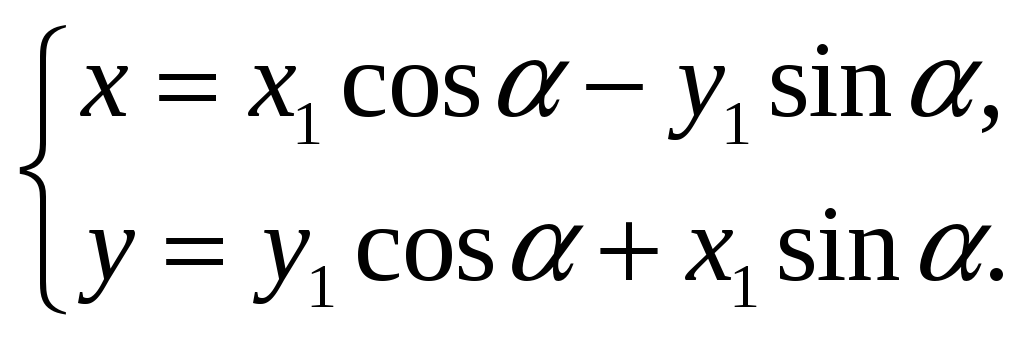 (51)
(51)
Эти формулы
выражают старые координаты точки
![]() через её новые координаты в случае
поворота осей координат.
через её новые координаты в случае
поворота осей координат.
Общий случай.
Пусть
![]() – исходная система координат,
– исходная система координат,
![]() – новая система координат (рис. 31).
Положение новой системы по отношению
к старой определим, задав:
– новая система координат (рис. 31).
Положение новой системы по отношению
к старой определим, задав:
-
координаты
 нового начала
нового начала
 в старой системе координат;
в старой системе координат; -
угол
 который образует ось
который образует ось
 с Ox.
с Ox.
П
Рис. 31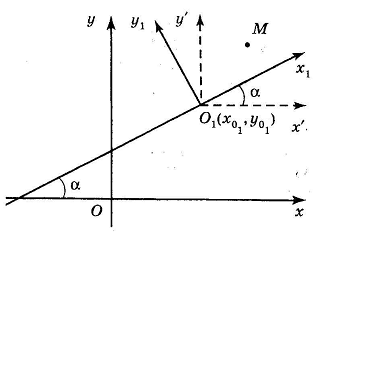
![]() – координаты точки
– координаты точки
![]() в старой системе, а
в старой системе, а
![]() – координаты точки
– координаты точки
![]() в новой системе. Нужно найти связь между
ними. С этой целью введём вспомогательную
систему координат
в новой системе. Нужно найти связь между
ними. С этой целью введём вспомогательную
систему координат
![]() ,
полученную параллельным переносом
старой системы
,
полученную параллельным переносом
старой системы
![]() Пусть
Пусть
![]() ,
,
![]() – координаты точки
– координаты точки
![]() в
этой вспомогательной системе. Так как
новая система координат
в
этой вспомогательной системе. Так как
новая система координат
![]() получена поворотом вспомогательной
системы
получена поворотом вспомогательной
системы
![]() на угол
на угол
![]() то координаты
то координаты
![]() ,
,
![]() точки
точки
![]() через координаты
через координаты
![]() этой точки выражаются формулами (51), в
которых
этой точки выражаются формулами (51), в
которых
![]() нужно заменить на
нужно заменить на
![]() ,
,
![]() :
:
 (52)
(52)
Так как система
координат
![]() получена параллельным переносом
получена параллельным переносом
![]() ,
то координаты
,
то координаты
![]() точки
точки
![]() в исходной системе выражаются через
координаты
в исходной системе выражаются через
координаты
![]() ,
,
![]() по формулам (48), в которых
по формулам (48), в которых
![]() нужно заменить на
нужно заменить на
![]() :
:
![]() В эти формулы вместо
В эти формулы вместо
![]() ,
,
![]() подставим (52) и получим
подставим (52) и получим
 (53)
(53)
Эти формулы
выражают старые координаты
![]() точки
точки
![]() через её новые координаты
через её новые координаты
![]() в новой системе.
в новой системе.
Преобразования
координат на плоскости применяются, в
частности, для упрощения вида уравнений
кривых. В системе координат
![]() возьмём, например, эллипс с каноническим
уравнением
возьмём, например, эллипс с каноническим
уравнением
![]() (54)
(54)
Подставим вместо
![]() их выражения (53) через
их выражения (53) через
![]() ,
тем самым получим уравнение эллипса в
новой системе координат
,
тем самым получим уравнение эллипса в
новой системе координат
![]() .
Это будет уравнение общего вида (после
раскрытия скобок)
.
Это будет уравнение общего вида (после
раскрытия скобок)
![]()
![]() .
.
Таким образом,
перейдя к системе
![]() ,
от канонического уравнения (54) эллипса
мы перешли к более сложному уравнению
– уравнению второй степени общего
вида. Можно показать, что, наоборот, от
последнего уравнения в системе
,
от канонического уравнения (54) эллипса
мы перешли к более сложному уравнению
– уравнению второй степени общего
вида. Можно показать, что, наоборот, от
последнего уравнения в системе
![]() ,
подобрав другую систему координат
,
подобрав другую систему координат
![]() можно получить каноническое уравнение,
определяющее либо окружность, либо
эллипс, либо параболу, либо гиперболу,
либо пару прямых, как, например, уравнение
можно получить каноническое уравнение,
определяющее либо окружность, либо
эллипс, либо параболу, либо гиперболу,
либо пару прямых, как, например, уравнение
![]() (
(![]() ,
,
![]() ),
если не имеет место случай, когда
уравнение определяет лишь точку или
ничего не определяет.
),
если не имеет место случай, когда
уравнение определяет лишь точку или
ничего не определяет.