

Функции свт (эвм) в асу тп
-
Информационная

-
Советчик оператора

-
Управляющая

ТОУ – технологический объект управления
П – пульт оператора
А – аппаратчик
ЛС – локальные системы
ВУ – верхний уровень
ВИ – верхняя информация
ДУ – дистанционное управление
РУ – ручное управление
СВТ – средства вычислительной техники
-
Напишите общий вид постановки оптимизационной задачи на формализованном языке.
Формализованная запись оптимизационной задачи
I = B → max (min) / Ω,
![]()
где
![]() –
вектор параметров, Ω – ограничение, I
– критерий, B – величина,
→ – «следует», / – «при условии».
–
вектор параметров, Ω – ограничение, I
– критерий, B – величина,
→ – «следует», / – «при условии».
Ω а
– автономные ограничения
а
– автономные ограничения
Ω
Ω с
– ограничения типа связей
с
– ограничения типа связей
Пример: Настройка на апериодический процесс:
![]() .
.
![]()

Зачем нужна формализация - для разделения труда.
-
Охарактеризуйте две составляющие оптимизационных задач – критерия и ограничений. Приведите примеры.
Критерий – величина, соотношение, характеризующее качество работы ТОУ в целом или рассматриваемый объект изучения, и принимающее числовые значения в зависимости от управляющих воздействий или факторов, его определяющих.
Критерий – первая составляющая оптимизационной задачи.
Ограничение – вторая составляющая оптимизационной задачи.
Пример: Задача. Требуется выделить садовый участок прямоугольной формы при заданной длине ограды.
Представим графически:

Выберем критерий:
![]()


ограничение по связям автономные ограничения
Решение
-
Первый способ: метод исключения переменных.
S=ab
b=P/2-a
S=a((P/2)-a)
![]()
-
Второй способ: метод неопределенных множителей Лагранжа.
![]() – функция Лагранжа, где I
– критерий, λ – неопределенные множители
Лагранжа, Ω – ограничения.
– функция Лагранжа, где I
– критерий, λ – неопределенные множители
Лагранжа, Ω – ограничения.
Надо Ω записать в форме равенства нулю:
Pзад=2(a+b)=0.
Тогда:
![]()
Исходя из этого, составим систему уравнений:
Ответ: a=b.
-
В чем отличие статической и динамической оптимизации?
В динамических задачах аргументом будет время, в статических задачах аргумента t нет.
Вариационные задачи (изопериметрические) оптимизируются функционалом, функционал — это функция, аргументом которой является функция.
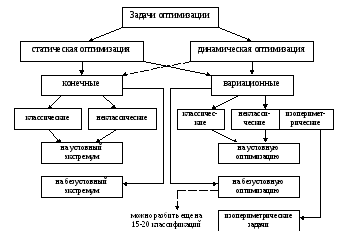
J=f(x) – задача конечная
J=f[x(Z)] – функционал (вариационная задача); x=f1(Z)
Классическая задача – ограничения в форме равенств.
Неклассическая задача – ограничения в форме неравенств.
Изопериметрическая задача – ограничения в форме интегралов.
-
Охарактеризуйте две группы методов оптимизации: по модели и непосредственно на объекте.
-
Методы оптимизации на основе мат. Моделей
-
метод исключения переменных
-
метод неопределенных множителей Лагранжа
-
метод линейного программирования (Контарович)
-
метод динамического программирования
-
принцип максимума Понтрягина
-
-
Методы оптимизации непосредственно на объекте
-
метод Бокса-Вильсона (покоординатного ?)
-
симплекс — метод
-
спросить про эту лекцию!!!
-
В чем отличие классических и неклассических оптимизационных задач?
Классическая задача – ограничения в форме равенств.
Неклассическая задача – ограничения в форме неравенств.
Собственно и все, что известно. Google молчит...
-
В чем отличие конечномерных и вариационных оптимизационных задач?
Тут все совсем печально...
21. Расскажите суть задачи оптимального вывода объектов периодического действия на режим. Теорема об n – интервалах и ее применение для решения данной задачи.
Качественное решение задачи оптимального быстродействия (а именно такое название получила эта задача) основано на теореме об n интервалах, которая впервые была выдвинута и доказана А.А. Фельдбаумом (1953г.) [1].
Теорема формулируется следующим образом [2]: “Если объект управления описывается линейным дифференциальным уравнением n - го порядка с постоянными коэффициентами и корни его характеристического уравнения вещественные отрицательные или нулевые, то для оптимального управления необходимо и достаточно n интервалов максимального управления Umax , а знаки на интервалах должны чередоваться n-1 раз”.
В частном случае, если в структурной схеме содержатся звенья с одинаковыми динамическими свойствами, то есть имеются одинаковые постоянные времени T, то количество интервалов управления будет равно (n-k+1), где k - число звеньев с одинаковыми динамическими свойствами. При n = k требуется всего один интервал управления. То же имеет место и если n = 1.
На формализованном языке задача оптимального быстродействия может быть записана в виде:

где I - критерий оптимизации,
T - искомый период
оптимального быстродействия, стрелка
![]() читается как “следует”, а косая черта
/ - “при условии”.
читается как “следует”, а косая черта
/ - “при условии”.
Количественное решение этой задачи было найдено группой математиков, возглавляемых акад. Л.С. Понтрягиным. Решение вылилось в известный принцип - “принцип максимума” [4].
Именно исходя из количественного решения задачи можно дать такие рекомендации по качественному решению задачи для статических объектов:
1) точка выхода на режим, определяющая Т*, где Т* - оптимальный искомый период Т, лежит дальше точки выхода на режим кривой разгона объекта на 3 - 5%;
2) первый интервал управления составляет порядка 93 - 97% от интервала достижения режима кривой разгона объекта;
3) Каждый последующий интервал управления меньше предыдущего.
Для астатических объектов такие рекомендации дать сложнее, в частности, первый интервал управления оказывается зачастую много меньше, чем рекомендованный для статических, что связанно со значением условной постоянной времени астатического звена.
Конечное управление UК для астатических объектов всегда равно нулю, а для статических определяется зависимостью:
![]() ,
(2)
,
(2)
где YЗД - значение заданного режима,
KОБ- общий коэффициент усиления (передачи) объекта.
В целом же, оптимальное по критерию максимума быстродействия (1) управление для линейного объекта имеет релейный характер, то есть управляющее воздействие мгновенно переходит из одного предельного значения Umax в другое Umin = - Umax и наоборот в должном образом подобранные моменты переключений.
-
Что такое ПФЭ? Две задачи и два вида планирования при активных экспериментах.
В практической деятельности часто требуется оценить параметры некоторой системы, то есть построить её математическую модель и найти численные значения параметров этой модели.
Полный факторный эксперимент (ПФЭ) – совокупность нескольких измерений, удовлетворяющих следующим условиям:
1.Количество измерений составляет 2n, где n – количество факторов;
2.Каждый фактор принимает только два значения – верхнее и нижнее;
3. В процессе измерения верхние и нижние значения факторов комбинируются во всех возможных сочетаниях.
Преимуществами полного факторного эксперимента являются
-
простота решения системы уравнений оценивания параметров;
-
статистическая избыточность количества измерений, которая уменьшает влияние погрешностей отдельных измерений на оценку параметров.
-
На чем основана возможность построения математической модели объекта в виде уравнения регрессии? Чему соответствуют коэффициенты этого уравнения? Как определить значение поверхности отклика в базовой точке по нему?
Я надеюсь, что это он расскажет нам во вторник =)
-
В чем суть статистических методов оптимизации на основе методов планирования эксперимента? Для чего они могут использоваться?
Результаты работ по планированию основаны на обработке большого числа результатов экспериментов, т.е. на использовании статистических данных и обработки их статистическими методами. Отсюда и методы оптимизации, основанные на статических методах получения математических моделей поверхности отклика, принято называть статистическими методами оптимизации.
Ну, и это надеюсь расскажет =)
-
Расскажите последовательность действий при решении задачи методом «крутого восхождения»?
-
Выбираем шаг движения по i - му фактору, например первому, причем этот шаг берется меньшим, чем интервал варьирования, то есть
![]() ;
;
-
В соответствии с (4) определяем
 ;
; -
Определяем величину шагов по остальным факторам
![]() i =
i =
![]()
![]() ;
;
-
Ставим эксперимент в точке с координатами
![]() (i =
(i =
![]() );
);
Для перевода в кодированные координаты используется следующая формула:
![]() ;
;
Шаг в кодированных координатах определяется по формуле:
![]()
-
Ставим эксперименты в точках с удвоением шага, утроением и т.д., то есть в соответствии с п. 4, но при
 ,
, и т.д.;
и т.д.; -
Эксперименты по п. 5 проводим до тех пор, пока yi не станет меньше yi – 1;
-
Принимаем за экстремум значение y* = yi-1 и рекомендуем вести процесс в точке с координатами, соответствующими y*.
Найденная точка является точкой локального оптимума (экстремума) на поверхности отклика в ее сечении по направлению “крутого восхождения”.
-
В чем суть метода «крутого восхождения»? Как определяется направление градиента из модели в виде уравнения регрессии, полученной на основе ПФЭ?
По методу “крутого восхождения” движение к оптимуму начинают из центра плана, который использовался для получения математического описания функции отклика искомого процесса согласно методике ПФЭ.
При этом, если известно уравнение регрессии в кодированных координатах в виде линейных эффектов, то для движения по методу “крутого восхождения” в этих координатах (а оно совпадает приближенно с направлением градиента поверхности отклика) достаточно двигаться в направлении вектора, построенного как результирующий на базе векторов, отложенных по осям кодированных координат и численно равных значениям коэффициентов при соответствующих факторах уравнения регрессии с учетом их знака [1, 2].
Это действительно так в силу того, что значения этих коэффициентов bi приблизительно равны частным производным по соответствующим факторам от функции отклика, то есть
![]() (1)
(1)
Тогда их векторная сумма, то есть
![]() ,
(2)
,
(2)
где
![]() ,
,![]() ,
,![]() - единичные орты по соответствующим
осям кодированных координат, а n
- число факторов ПФЭ, приблизительно
равно градиенту
- единичные орты по соответствующим
осям кодированных координат, а n
- число факторов ПФЭ, приблизительно
равно градиенту
![]() функции отклика, то есть
функции отклика, то есть
![]() (3)
(3)