

5.2.1 . Частотный метод анализа качества сау,
основанный на преобразовании Фурье
Выделяя действительные и мнимые части функций
XС (iω) = UС (ω)+ i VС (ω),
выражение (5.5) перепишем в виде

Учитывая четность функций UС (ω) и cos ωt и нечетность функций VС (ω) и sin ωt, получим
![]()
Тогда
![]() (5.6)
(5.6)
Полагая, что при t < 0 xc (t) = 0, можно записать
![]() (5.7)
(5.7)
В результате сложения (5.6) и (5.7) получим
![]() (5.8)
(5.8)
Учитывая четность подынтегральной функции, выражение (5. 8) принимает вид
![]() (5.9)
(5.9)
В результате вычитания (5.6) из (5.7) получим
![]()
или
![]() (5.10)
(5.10)
Найдем зависимость функций Uc(ω) и Vc(ω) от действительной U(ω) и мнимой V(ω) частей АФЧХ Ф(iω) замкнутой системы.
На основании теоремы операционного исчисления о предельном значении функции можно записать
![]()
Если
f
(t)
= l
(t),
т.е. F(p)
=![]() и
и
![]() то
то
![]() (5.11)
(5.11)
Тогда
![]()
или
![]()
т.е.
![]() ;
(5.12)
;
(5.12)
![]() . (5.13)
. (5.13)
На основании (5.9) с учетом (5.12) будем имееть
![]() (5.14)
(5.14)
На основании (5.10) с учетом (5.13):
![]() (5.15)
(5.15)
Полное движение системы x(t)= xС (t) + xB (t) .
Учитывая (5.1 1) и (5.15), получим

где
![]() (Табличный интеграл).
(Табличный интеграл).
С учетом этого
 (5.16)
(5.16)
Формула (5.16) связывает функцию x(t) с U(ω). Она позволяет вычислить координаты графика переходного процесса по известным значениям вещественной частотной характеристики. Иногда пользуются приближенным методом построения переходного процесса с помощью трапециидальных частотных характеристик..
-
Приближенный метод построения кривой переходного процесса с помощью трапециидальных частотных
характеристик
В выражении (5.16) производят следующую замену:
![]() ,
(5.17)
,
(5.17)
где Uk(ω) - трапеции, две стороны которых совпадают с осями координат;
r - количество трапеций, на которые разбивается вещественная характеристика U(ω).
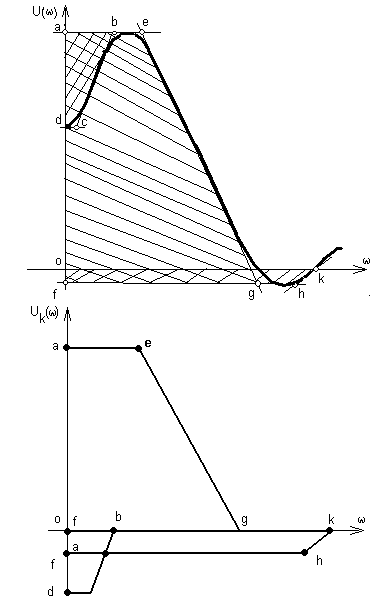
Замена (5.17) соответствует аппроксимации вещественной частотной характеристики U(ω) суммой трапеций (рис. 5.2 а). При этом суммарная площадь трапеций (с учетом их знаков) должна быть приблизительно равна площади под кривой вещественной характеристики.
Кривая переходного процесса системы строится в результате сложения переходных процессов xк (t), соответствующих k-м трапециям.
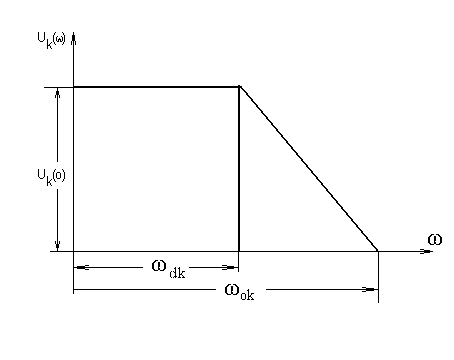
Каждая из трапеций характеризуется следующими координатами τok, ωdk, ωok
(рис. 5.2 б) и относительной величиной
![]()
Существуют таблицы h-функций для единичных трапеций с различными коэффициентами наклона χ.
а б
Рис. 5.2
Кривая переходного процесса получается суммированием построенных h-функций с учетом правил масштабов, которые заключаются в следующем.
1. Перед сложением ординату каждой h-функции необходимо умножить на высоту соответствующей трапеции (с учетом знака).
2. Перед сложением необходимо изменить масштаб времени каждой h -функции в соответствии с теоремой подобия.
Действительное время равно времени t, приведенному в таблице h(τ) функций, деленному на частоту среза соответствующей трапециидальной характеристики:
![]()