

03 семестр / К экзамену-зачёту / Шпора №2
.docФизические основы механики
Лекция 1. Предмет физики. Физический объект, физическое явление, физический закон. Методы физических исследований. Физика и современное естествознание. Системы единиц физических величин. Механическое движение, система отсчета. Кинематика материальной точки и абсолютно твердого тела: кинематические уравнения движения; траектория; путь и перемещение; мгновенные скорость и ускорение при прямолинейном и криволинейном движении; центр кривизны; угловая скорость, нормальное и тангенциальное ускорения при вращательном движении. Силы. Масса. Импульс материальной точки и механической системы. Динамика поступательного движения в инерциальных системах отсчета.
Предмет физики. Физический объект, физическое явление, физический закон. Методы физических исследований.
Физика — это наука о природе в самом общем смысле. Она изучает вещество и энергию, а также фундаментальные взаимодействия природы, управляющие движением материи.
Физический объект – это любой предмет подлежащий рассмотрению в физике.
Физические явление - различные изменения, происходящие с физическими телами.
Физический закон - отражение связи или зависимости между некоторыми физическими величинами.
Методы физических исследований:
Экспериментальный метод: обнаружение ранее неизвестных явлений, подтверждение или опровержение физических теорий.
Теоретический метод: формулирование общих законов природы и объяснение на основе этих законов различных явлений, предсказание явлений.
Физика и современное естествознание. Системы единиц физических величин.
Физика — это наука о природе в самом общем смысле. Она изучает вещество (материю) и энергию, а также фундаментальные взаимодействия природы, управляющие движением материи.
Физику иногда называют «фундаментальной наукой», поскольку другие естественные науки описывают только некоторый класс материальных систем, подчиняющихся законам физики.
Единицы измерения используются для представления результатов измерений. Различают базовые единицы измерения, которые определяются с помощью эталонов, и производные единицы, определяемые с помощью базовых. Единица ф.в. - это отношение измеренного значения к некоторому стандартному значению, Число с указанием единицы измерения называется именованным.
1) Механическое движение, система счета. Кинематика материальной точки и абсолютно твердого тела: кинематическое уравнение движения, траектория, путь и перемещение.
Механическим движением тела - изменение его положения в пространстве относительно других тел с течением времени.
Система отсчёта — это совокупность тела отсчёта, системы координат и системы отсчёта времени, связанных с этим телом, по отношению к которому изучается движение каких-либо других материальных точек.
Предмет кинематики: описание механических движений тела без рассмотрения причин изменения вида движения.
2) Кинематическое уравнение движения: вид функциональной зависимости всех трех ее координат от времени:
![]() ;вид
зависимости от времени радиус-вектора
этой точки:
;вид
зависимости от времени радиус-вектора
этой точки:
![]()
Траектория - линия, вдоль которой движется материальная точка;
Перемещением тела - вектор, проведенный из начального положения тела в его конечное положение.
![]() - приращение
радиуса-вектора точки за рассматриваемый
промежуток времени.
- приращение
радиуса-вектора точки за рассматриваемый
промежуток времени.
Путь - расстояние, пройденное точкой по е. траектории;
3) Кинематика материальной точки и абсолютно твердого тела: мгновенная скорость и ускорение при прямолинейном и криволинейном движении.
Предмет кинематики: описание механических движений тела без рассмотрения причин изменения вида движения.
Мгновенная
скорость -
величина, равная пределу средней
векторной скорости при уменьшении
промежутка времени
![]()
![]()
Ускорение
точки при прямолинейном движении
![]()
![]()
Ускорение
точки при движении по кривой
![]()
где v — величина скорости, R — радиус кривизны траектории.
![]() — единичный
касательный к траектории вектор,
направленный вдоль скорости (касательный
орт),
— единичный
касательный к траектории вектор,
направленный вдоль скорости (касательный
орт),
![]() — орт нормали к
траектории,
— орт нормали к
траектории,
![]() — орт бинормали к траектории,
— орт бинормали к траектории,
4) Кинематика материальной точки и абсолютно твердого тела: центр кривизны; угловая скорость, нормальное и тангенциальное ускорение при вращательном движении.
Центр соприкасающейся окружности называют центром кривизны.
Ускорение точки при движении по окружности
Тангенциальное
ускорение
- направлено по касательной к траектории,
характеризует изменение скорости по
модулю.
![]()
Центростремительное
ускорение -
возникает при движении точки по окружности
![]()
Угловое
ускорение
![]() —
показывает, насколько изменилась угловая
скорость за единицу времени.
—
показывает, насколько изменилась угловая
скорость за единицу времени.
Угловая
скорость тела равна отношению угла
поворота к промежутку времени.
![]()
5) Силы, масс.
Под массой понимают два различных свойства физического объекта:
- Гравитационная масса показывает, с какой силой тело взаимодействует с внешними гравитационными полями.
- Инертная масса, которая характеризует меру инертности тел.
Сила – векторная физическая величина, являющаяся мерой взаимодействия тел.
Существует 4 основных типа взаимодействия: гравитационное, электромагнитное, сильное, слабое.
Сила характеризуется:
1. Величиной (модулем);
2. Направлением;
3. Точкой приложения.
Второй закон Ньютона гласит, что в инерциальных системах отсчета скорость изменения импульса материальной точки равна приложенной силе.
Единицы измерения силы -Ньютон
6) Импульс материальной точки и механической системы.
Импульс — векторная физическая величина, характеризующая меру механического движения тела.
![]() направление
импульса совпадает с направлением
вектора скорости:
направление
импульса совпадает с направлением
вектора скорости:
Импульс механической системы равен векторной сумме импульсов всех частей системы.
7) Динамика поступательного движения в инерциальных системах отсчета
Динамика основана на 3-х законах ньютона и закона сохранения импульса.
1-й: Существуют такие системы отсчета, относительно которых поступательно движущееся тело сохраняет свою скорость постоянной, если на него не действуют другие тела или их действие скомпенсировано.
![]()
2-й: В инерциальной системе отсчета сумма всех сил, действующих на тело, равна произведению массы этого тела на векторное ускорение этого же тела (действие на тело силы, проявляется в сообщении ему ускорения).
![]()
![]()
3-й: Тела действуют друг на друга силами равными по модулю и противоположными по направлению
![]()
![]()
Закон
сохранения импульса утверждает, что
сумма импульсов всех тел (или частиц)
замкнутой системы есть величина
постоянная.
![]()
Лекция 2. Закон изменения импульса механической системы. Закон сохранения импульса и однородность пространства. Момент силы относительно неподвижной точки и оси. Момент инерции относительно неподвижной оси, момент импульса материальной точки и механической системы относительно неподвижной точки и оси. Уравнение моментов: закон изменения момента импульса механической системы. Закон сохранения момента импульса механической системы и его связь с изотропностью пространства.
Закон изменения импульса механической системы.
Закон
сохранения импульса
утверждает, что сумма импульсов всех
тел (или частиц) замкнутой системы есть
величина постоянная.
![]()
Закон сохранения импульса тела: импульс тела сохраняется, если импульс равнодействующей всех сил, действующих на это тело, равен нулю. Это возможно в случаях, когда
-на тело не действуют силы вообще или
-равнодействующая всех сил, действующих на тело, равна нулю, или
-промежуток времени , в течение которого мы наблюдаем за состоянием тела, очень мал (стремится к нулю ), а равнодействующая всех сил, действующих на тело, ограничена по модулю (не бесконечно большая).
Закон сохранения импульса и однородность пространства
В основе закона сохранения импульса лежит однородность пространства, т. е. одинаковость свойств пространства во всех точках (симметрия по отношению к сдвигу начала координат). Одинаковость следует понимать в том смысле, что параллельный перенос замкнутой системы из одного места пространства в другое, без изменения взаимного расположения и скоростей частиц, не изменяет механические свойства системы.
1) Момент силы относительно неподвижной точки и оси.
Моментом силы относительно неподвижной оси Z называется скалярная величина Mz , равная проекции на эту ось вектора М момента силы, определенного относительно произвольной точки О данной оси z.
Если
ось z совпадает с направлением вектора
М, то момент силы представляется в виде
вектора, совпадающего с осью:
![]()
Моментом
силы F относительно неподвижной точки
О называется
физическая величина, определяемая
векторным произведением радиуса-вектора
r,
проведенного из точки О в точку А
приложения силы, на силу F
![]()
2) Момент инерции материальной точки и механической системы относительно неподвижной оси.
Произведение массы материальной точки тела на квадрат ее расстояния до оси вращения называется моментом инерции материальной точки относительно оси вращения.
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется физическая величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
![]() где mi
— масса i-й точки,
ri — расстояние
от i-й точки до оси.
где mi
— масса i-й точки,
ri — расстояние
от i-й точки до оси.
3) Момент импульса материальной точки и механической системы относительно неподвижной точки и оси.
Момент
импульса частицы относительно некоторого
начала отсчёта определяется векторным
произведением ее радиус-вектора и
импульса:
![]() где — r
- радиус-вектор
частицы относительно выбранного
неподвижного в данной системе отсчета
начала отсчёта, — p
- импульс
частицы.
где — r
- радиус-вектор
частицы относительно выбранного
неподвижного в данной системе отсчета
начала отсчёта, — p
- импульс
частицы.
Для
мех систем
![]() .
.
4) Уравнение моментов импульса: Закон изменения момента импульса механической системы.
Уравнение
моментов. Пользуясь уравнением момента
импульса твердого тела
![]() .
.
![]() Первое слагаемое
в выражении (7.4) равняется нулю, поскольку
производная от радиуса по времени,
являющаяся скоростью i-ой
части тела, параллельна ее импульсу.
Второе слагаемое преобразуем,
воспользовавшись 2-ым
законом Ньютона:
Первое слагаемое
в выражении (7.4) равняется нулю, поскольку
производная от радиуса по времени,
являющаяся скоростью i-ой
части тела, параллельна ее импульсу.
Второе слагаемое преобразуем,
воспользовавшись 2-ым
законом Ньютона:![]() ,
где
,
где
![]() - соответственно сумма внешних и
внутренних силы, действующие на i-ый
элемент тела. Подставим это в уравнение
и получим
- соответственно сумма внешних и
внутренних силы, действующие на i-ый
элемент тела. Подставим это в уравнение
и получим
![]()
Закон: Момент импульса системы тел сохраняется неизменным при любых взаимодействиях внутри системы, если суммарный момент внешних сил, действующих на систему равен нулю.
5) Закон сохранения момента импульса механической системы и его связь с изотропностью пространства.
В основе закона сохранения импульса лежит однородность пространства, т. е. одинаковость свойств пространства во всех точках (симметрия по отношению к сдвигу начала координат). Одинаковость следует понимать в том смысле, что параллельный перенос замкнутой системы из одного места пространства в другое, без изменения взаимного расположения и скоростей частиц, не изменяет механические свойства системы.
Лекция 3. Работа и кинетическая энергия. Консервативные силы. Работа в потенциальном поле. Связь между потенциальной энергией и силой. Потенциальные энергии тяготения и упругих деформаций. Уравнение изменения механической энергии. Закон сохранения механической энергии и его связь с однородностью времени.
1) Работа и кинетическая энергия.
Кинетическая энергия — энергия механической системы, зависящая от скоростей движения её точек.
![]()
![]() где:
где:
![]() — масса тела;
— масса тела;
![]() — скорость центра масс тела;
— скорость центра масс тела;
![]() — момент инерции
тела;
— момент инерции
тела;
![]() — угловая скорость тела.
— угловая скорость тела.
Единица измерения в системе СИ — Джоуль.
Работа
всех сил, действующих на частицу, идёт
на приращение кинетической энергии
частицы:
![]()
2) Консервативная сила. Работа в потенциальном поле.
Консервативные силы (потенциальные силы) — силы, работа которых не зависит от формы траектории.
Для консервативных сил выполняются следующие тождества:
![]() — работа
консервативных сил равен 0;
— работа
консервативных сил равен 0;
![]() — работа
консервативных сил по произвольному
замкнутому контуру равна 0;
— работа
консервативных сил по произвольному
замкнутому контуру равна 0;
![]() — консервативная
сила является градиентом некой скалярной
функции U,
называемой силовой.
— консервативная
сила является градиентом некой скалярной
функции U,
называемой силовой.
В потенциальном поле работа сил поля на любом замкнутом пути равна нулю.
![]()
3) Связь между потенциальной энергией и силой.
Работа:
![]() ,
где
,
где
![]() -проекция
-проекция
![]() на перемещение.
на перемещение.
![]() -
потенциальная энергия.
-
потенциальная энергия.
![]() .
.
![]()
![]() - среднее значение на отрезке
- среднее значение на отрезке
![]() Для того, чтобы найти положение любой
точки необходимо найти предел:
Для того, чтобы найти положение любой
точки необходимо найти предел:
![]() - частная производная энергии по
направлению. Поскольку направление S
было
выбрано произвольно, то можно представить
это по координатам:
- частная производная энергии по
направлению. Поскольку направление S
было
выбрано произвольно, то можно представить
это по координатам:
 Эта функция представляет проекции
вектора силы на координатные оси.
Эта функция представляет проекции
вектора силы на координатные оси.![]()
![]()
4) Потенциальные энергии тяготения и упругих деформаций
Потенциальная энергия упругой деформации характеризует взаимодействие между собой частей тела.
Потенциальная энергия в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
Ep = mgh,
где Ep — потенциальная энергия тела, m — масса тела, g — ускорение свободного падения, h — высота положения центра масс тела
5) Уравнение изменения механической энергии
Изменение кинетической энергии системы равно суммарной работе всех сил, действующих на тела этой системы: DEк = Aпот.с.+ Aнепот.с.+ Aвнеш.с.
Изменение потенциальной энергии системы равно работе потенциальных сил с обратным знаком:
DEп = - Aпот.с.
Изменение полной механической энергии равно: DE = DEп + DEк
Из уравнений получим, что изменение полной механической энергии равно суммарной работе всех внешних сил и внутренних непотенциальных сил. DEк = Aвнеш.с.+ Aнепот.с.
6) Закон сохранения механической энергии и его связь с однородностью времени.
Полная
механическая энергия замкнутой системы
тел, между которыми действуют только
консервативные силы, остаётся постоянной.

Закон сохранения механической энергии связан с однородностью времени, однородность времени проявляется в том, что законы движения замкнутой системы не зависят от выбора начала отсчета времени.
Колебания и волны
Лекция 4. Уравнение гармонических колебаний. Представление гармонических колебаний на векторной диаграмме. Сложение гармонических колебаний одного направления равных и близких частот. Сложение взаимно перпендикулярных гармонических колебаний равных и кратных частот.
1) Свободные незатухаюшие колебания.
Колебания, при
которых изменения физических величин
происходят по закону косинуса или синуса
(гармоническому закону), наз. гармоническими
колебаниями.
![]()
![]() ,
где ω
– частота колебания, xm
– амплитуда колебания, φ0
и φ0’
– начальные фазы колебания.
,
где ω
– частота колебания, xm
– амплитуда колебания, φ0
и φ0’
– начальные фазы колебания.
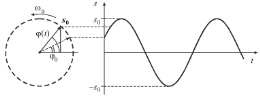
2) Представление гармонических колебаний на векторной диаграмме.
Для представления величины x, изменяющейся по гармоническому закону x = A·cos(w·t + f0), изобразим на произвольной оси X вектор r, исходящим из точки O. Пусть длина данного вектора равна амплитуде A, а угол с осью X равен фазе Ф. Допустим, что вектор r вращается вокруг точки O с угловой скоростью w против часовой стрелки, что соответствует положительному направлению отсчета углов. Тогда угол между вектором и осью, равный фазе колебаний, будет изменяться по закону Ф(t) = w·t + f0. Значение физической величины x в любой момент времени зададим как проекцию вектора r на ось Х:
rx = x = A·cos(w·t + f0).Итак, скалярное гармоническое колебание можно представить как проекцию вектора с амплитудой A, который вращается вокруг закрепленной точки O с постоянной угловой скоростью w.
3) Cложение взаимно перпендикулярных гармонических колебаний равных и кратных частот.
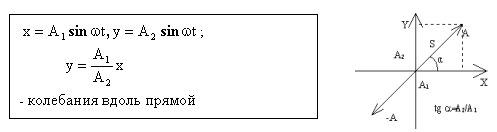
![]() - гармонические
колебания той же частоты с амплитудой
- гармонические
колебания той же частоты с амплитудой
![]()
Частоты
одинаковы, фазы сдвинуты на
![]() ,
амплитуды различны:
,
амплитуды различны:

Частоты и амплитуды различны:
![]() - получаем либо
незамкнутые траектории, либо фигуры
Лиссажу (замкнутые кривые), если частоты
кратные.
- получаем либо
незамкнутые траектории, либо фигуры
Лиссажу (замкнутые кривые), если частоты
кратные.
4) Cложение гармонических колебаний одного направления равных и близких частот.
При
сложении двух гармонических колебаний
одинакового направления и частоты,
результирующее смещение будет суммой
(![]() )
смещений
)
смещений
![]() и
и
![]() ,
которые запишутся следующими выражениями:
,
которые запишутся следующими выражениями:
![]() ,
,
![]() ,
,
Сумма двух гармонических колебаний также будет гармоническим колебанием той же круговой частоты:
![]() =
=
![]() .
.
В зависимости от разности фаз (φ2-φ1):
1) (φ2-φ1) = ±2mπ (m=0, 1, 2, …), тогда A= А1+А2, т. е. амплитуда результирующего колебания А равна сумме амплитуд складываемых колебаний;
2) (φ2-φ1) = ±(2m+1)π (m=0, 1, 2, …), тогда A= |А1-А2|, т. е. амплитуда результирующего колебания равна разности амплитуд складываемых колебаний
Лекция 5. Энергия и импульс гармонического осциллятора. Фазовая траектория. Уравнение колебаний физического маятника. Квазиупругая сила. Свободные затухающие колебания. Логарифмический декремент затухающих колебаний. Добротность колебательной системы. Вынужденные колебания. Механический резонанс.
1) Энергия и импульс гармонического осциллятора.
Гармоническим осциллятором называется любая физическая система, совершающая гармонические колебания
Импульс
-
![]()
Кинетическая
энергия
![]() потенциальная энергия
потенциальная энергия
![]()
Полная
энергия
![]()
2) Фазовая траектория.
След от движения изображающей точки называется фазовой траекторией. Через каждую точку фазовой плоскости проходит лишь одна фазовая траектория, за исключением особых точек.
Особой точкой называется точка, в которой векторное поле равно нулю и является положением равновесия или точкой покоя динамической системы.
|
Система. |
Период |
Цикл. частота |
Уравнение |
|
Математический маятник. |
|
|
|
|
Пружинный маятник. |
|
|
|
|
Физический маятник. |
|
|
|
|
Колебательный контур. |
|
|
|
Квазиупругая сила — это сила, пропорциональная смещению тела (аналогично силе упругости), но ее природа не связана с упругой деформацией тела. Fупр=kx, где k = m2.
3) Логарифмический декремент затухающих колебаний. Добротность колебательной системы.
Декремент затухающих кол. d равен натуральному логарифму отношения двух последующих максимальных отклонений х колеблющейся величины в одну и ту же сторону:
![]()
Декремент затухающих кол. характеризует число периодов, в течение которых происходит затухание колебаний, а не время такого затухания. Полное время затухания определяется отношением Т/d.
Добротность колебательной системы, отношение энергии, запасённой в колебательной системе, к энергии, теряемой системой за один период колебания. Добротность характеризует качество колебательной системы, т.к. чем больше Д. к. с., тем меньше потери энергии в системе за одно колебание. Д. к. с. Q связана с логарифмическим декрементом затухания d; при малых декрементах затухания Q " p/d.
![]() где масса m,
жёсткость k
и коэффициент трения b
где масса m,
жёсткость k
и коэффициент трения b
4) Механический резонанс.
Механическим резонансом называется резкое возрастание амплитуды колебаний тела при совпадении частоты внешнего воздействия с частотой собственных колебаний этого тела.
Частота
резонанса маятника
![]()
Частота
резонанса струны

Лекция 6. Виды механических волн. Основы акустики. Элементы физиологической акустики. Уравнение плоской бегущей синусоидальной и сферической волн. Звуковые волны в газах. Скорость распространения звука. Волновое уравнение распространения акустических волн в линейной однородной изотропной непоглощающей упругой среде. Волновое уравнение распространения упругих волн в стержнях. Давление звука, объемная плотность энергии, вектор плотности потока энергии, интенсивность звуковой волны. Когерентные волны. Интерференция волн. Акустическая стоячая волна для случая нормального падения плоской акустической волны на плоскую границу более плотной упругой среды
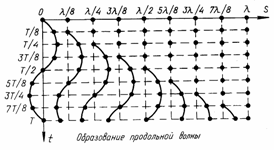
1) Виды механических волн. Основы акустики. Элементы физиологической акустики.
Вид мех. волн делятся на:
- поперечные, когда частицы среды колеблются перпендикулярно (поперек) лучу волны
 (это для примера)
(это для примера)
-
продольные,
когда частицы среды колеблются вдоль
луча волны.
 (это
для примера)
(это
для примера)