

§ 8.5. Точные методы исследования устойчивости нелинейных сау.
1. Прямой (второй) метод Ляпунова.
Уравнения САУ в форме Коши имеют вид (в отклонениях):
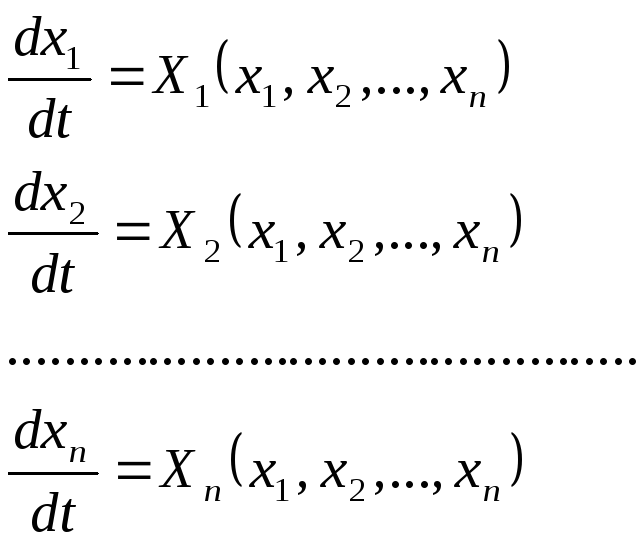 …(5.62).
…(5.62).
![]() - произвольные функции, содержащие любые
нелинейности;
- произвольные функции, содержащие любые
нелинейности;
![]() - отклонения переменных САУ, удовлетворяющие
условию:
- отклонения переменных САУ, удовлетворяющие
условию:
![]() ;
;
![]()
Пусть имеется функция
нескольких переменных
![]() ,
которая обращается в нуль в начале
координат, т.е. при
,
которая обращается в нуль в начале
координат, т.е. при
![]() и непрерывна в некоторой области вокруг
него.
и непрерывна в некоторой области вокруг
него.
1. Функция V называется знакоопределенной в некоторой области, если она во всех точках этой области вокруг начала координат сохраняет один и тот же знак и не обращается в нуль, кроме только самого начала координат.
2. Функция V называется знакопостоянной, если она сохраняет один и тот же знак, но может обращаться в нуль не только в начале координат, но и в других точках данной области.
3. Функция V называется знакопеременной, если она в данной области вокруг начала координат может иметь разные знаки.
1.1. Функция Ляпунова и ее производная во времени.
Любую функцию
![]() ,
тождественно обращающуюся в нуль при
,
тождественно обращающуюся в нуль при
![]() ,
будем называть функцией Ляпунова, если
в ней в качестве величин
,
будем называть функцией Ляпунова, если
в ней в качестве величин
![]() взяты те отклонения переменных САУ в
переходном процессе
взяты те отклонения переменных САУ в
переходном процессе
![]() ,
в которых записываются уравнения Коши
для этой системы.
,
в которых записываются уравнения Коши
для этой системы.
Производная от функции Ляпунова по времени будет:
![]() …(5.63).
Подставив вместо
…(5.63).
Подставив вместо
![]() - значения из уравнении Коши, получим:
- значения из уравнении Коши, получим:
![]() или
или
![]() …(5.64).
…(5.64).
Следовательно, производная от функции Ляпунова по времени, так же, как и сама функция V, является некоторой функцией отклонений переменных САУ. Поэтому к ней применимы понятия знакоопределенности, знакопостоянства и знакопеременности.
1.2. Теорема Ляпунова.
Если в заданных в форме Коши уравнениях
системы n-ого порядка
можно подобрать такую знакоопределенную
функцию Ляпунова
![]() ,
чтобы ее производная по времени
,
чтобы ее производная по времени
![]() тоже была знакоопределенной (или
знакопостоянной), но имела знак,
противоположный знаку V,
то данная система устойчива.
тоже была знакоопределенной (или
знакопостоянной), но имела знак,
противоположный знаку V,
то данная система устойчива.
При знакоопределенной W будет асимптотическая устойчивость.
Для простоты возьмем САУ 3-го порядка:
 …(5.65).
…(5.65).
![]() - знакоопределенная положительная;
- знакоопределенная положительная;
![]() - произвольно заданные положительные
вещественные числа.
- произвольно заданные положительные
вещественные числа.
Будем предавать величине
V
возрастающие постоянные значения
![]() V
= О, С,, С2,...,
что означает:
V
= О, С,, С2,...,
что означает:
 …(5.66).
…(5.66).
Возьмем производную по времени от V:
![]()
Если
![]() - знакоопределенная во всех точках
фазового пространства, кроме начала
координат, где
- знакоопределенная во всех точках
фазового пространства, кроме начала
координат, где
![]() ,
то при любых начальных условиях
изображающая точка М
(рис. 5.32) будет двигаться в сторону
уменьшения значения V,
т.е. будет пересекать эллипсоиды,
изображенные на рисунке извне - внутрь.
,
то при любых начальных условиях
изображающая точка М
(рис. 5.32) будет двигаться в сторону
уменьшения значения V,
т.е. будет пересекать эллипсоиды,
изображенные на рисунке извне - внутрь.

Рис. 5.32. Функция Ляпунова.
В результате с течением времени изображающая точка М будет стремиться к началу координат фазового пространства и уже не сможет выйти за пределы тех эллипсоидов, внутрь которых она проникла.
Это означает затухание всех
отклонений
![]() в переходном процессе с течением времени.
в переходном процессе с течением времени.
Это говорит об устойчивости САУ в случае знакоопределенной отрицательной W.
Если W
будет знакопостоянной, то траектория
изображающей точки не везде будет
пересекать поверхности
![]() ,
а может их касаться в тех точках, где W
обращается в ноль. В этом случае необходимо
проверить, не застрянет ли она в этой
точке, что определит для САУ наличие
предельного цикла.
,
а может их касаться в тех точках, где W
обращается в ноль. В этом случае необходимо
проверить, не застрянет ли она в этой
точке, что определит для САУ наличие
предельного цикла.
1.3. Теорема Ляпунова о неустойчивости нелинейных САУ.
Если при заданных уравнениях
САУ в форме Коши производная
![]() от какой-то функции Ляпунова
от какой-то функции Ляпунова
![]() окажется знакоопределенной, причем
сама функция V
в какой-нибудь области, примыкающей к
началу координат, будет иметь знак,
одинаковый со знаком производной W,
то данная система неустойчива.
окажется знакоопределенной, причем
сама функция V
в какой-нибудь области, примыкающей к
началу координат, будет иметь знак,
одинаковый со знаком производной W,
то данная система неустойчива.
Пусть при
![]()
![]() …(5.67)
оказалась знакоопределенно положительной.
…(5.67)
оказалась знакоопределенно положительной.
Пусть при этом линии
![]() на фазовой плоскости
располагаются так, как показано на рис.
5.33, где линии АВ
и CD
соответствуют значениям
на фазовой плоскости
располагаются так, как показано на рис.
5.33, где линии АВ
и CD
соответствуют значениям
![]() и разделяют те области, внутри которых
и разделяют те области, внутри которых
![]() и
и
![]() .
.

Рис. 5.33. Функция Ляпунова.
В точке М,
поскольку
![]() V
< 0 и везде
V
< 0 и везде
![]() ,
то точка М
будет стремиться и
пересекать
,
то точка М
будет стремиться и
пересекать
![]() ,
переходя от меньших значений С
к большим.
,
переходя от меньших значений С
к большим.
Она может временно приближаться к началу координат, но в конце концов будет удаляться от начала координат. Это соответствует расходящемуся процессу, т.е. неустойчивой системе.
2. Частотный метод В.М.Попова.
Если в САУ имеется лишь одна
нелинейность
![]() ,
то, объединив вместе
все остальные линейные уравнения
системы, можно всегда получить общее
уравнение линейной части САУ в виде
(рис. 5.34):
,
то, объединив вместе
все остальные линейные уравнения
системы, можно всегда получить общее
уравнение линейной части САУ в виде
(рис. 5.34):
![]() ,
где:
,
где:
![]() ;
;
![]() ;
;
![]() .
.

Рис. 5.34. Представление нелинейной САУ.

Рис. 5.35. Очертание нелинейности.
Пусть нелинейность имеет
любое очертание, не выходящее за пределы
угла
![]() (рис. 5.35), т.е. при любом х:
(рис. 5.35), т.е. при любом х:
![]() , тогда:
, тогда:
![]() ;
;
![]() …(5.68).
…(5.68).
Допускается, чтобы в выражении Q(S) было не более двух нулевых полюсов.
2.1. Теорема В.М. Попова.
Для установления устойчивости
нелинейной системы достаточно подобрать
такое конечное действительное число
h,
при котором при всех
![]()
![]() ,
где
,
где
![]() и
и
![]() - видоизмененные части
вещественной и мнимой частей передаточной
функции
- видоизмененные части
вещественной и мнимой частей передаточной
функции
![]() ,
при этом:
,
при этом:
![]() ,
,
![]() …(5.69);
…(5.69);
![]() …(5.70).
…(5.70).
График
![]() имеет вид, аналогичный
имеет вид, аналогичный
![]() ,
когда в выражениях Q(S)
и R(S)
разность степеней
,
когда в выражениях Q(S)
и R(S)
разность степеней
![]() (рис. 5.36 а).
(рис. 5.36 а).
Если же разность степеней
![]() ,
то конец графика
,
то конец графика
![]() будет на мнимой оси ниже начала координат
(рис. 5.36 б).
будет на мнимой оси ниже начала координат
(рис. 5.36 б).

Рис. 5.36. Графики
![]() .
.
Очевидно, что равенство
![]() …(5.71)
представляет уравнение
прямой на плоскости
…(5.71)
представляет уравнение
прямой на плоскости
![]() .
.
Отсюда вытекает графическая
интерпретация теоремы В.М.Попова: для
установления устойчивости нелинейной
САУ достаточно подобрать такую прямую
на плоскости
![]() ,
проходящую через точку
(
,
проходящую через точку
(![]() ),
чтобы вся кривая
),
чтобы вся кривая
![]() лежала справа от этой прямой.
лежала справа от этой прямой.

Рис. 5.37. Рис. 5.38.
На рис. 5.37 показаны примеры выполнения этой теоремы, а на рис. 5.38 - невыполнения.