

1.8.4.2. Момент инерции кольца
Вычислим моменты инерции некоторых простых тел. Найдем момент инерции однородного тонкостенного полого цилиндра (кольца) (см. рис. 1.55) массой m и радиусом R относительно перпендикулярной плоскости кольца оси симметрии. Разобьем кольцо на элементарные массы dm. По определению момент инерции . Ввиду малой толщины стенок цилиндра, можно считать, что все элементарные массы находятся на одинаковом расстоянии R от оси . То есть, r = R = const., тогда . Так как есть масса кольца, следовательно, момент инерции кольца относительно оси, перпендикулярной к его плоскости и проходящей через центр масс
Рис. 1.55
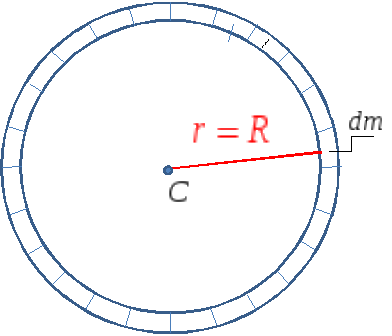
I = mR2.
1.8.4.3. Момент инерции сплошного цилиндра (диска)
Найдем момент инерции однородного сплошного цилиндра массой m и радиусом R относительно его геометрической оси . Разобьем цилиндр на отдельные полые концентрические цилиндры бесконечно малой толщины и радиуса . На рис. 1.56 показан только один такой цилиндр (выделен темным цветом). Момент инерции каждого полого цилиндра , где dm – масса элементарного цилиндра. Введем понятие поверхностной плотности массы цилиндра , где – площадь поверхности основания цилиндра. Тогда элементарная масса , где – площадь поверхности элементарного кольца, т. е. . Момент инерции сплошного цилиндра

.
Вынесем за знак интеграла:
Рис. 1.56
.
Учитывая, что , получим
.
То есть момент инерции однородного сплошного цилиндра массой m и радиусом R относительно его геометрической оси:
.
Для полого цилиндра момент инерции равен , где R1 и R2 – его внешний и внутренний радиусы.
1.8.4.4. Момент инерции однородного стержня
Найдем момент инерции тонкого однородного стержня относительно оси , проходящей через один из его концов перпендикулярно продольной геометрической оси симметрии (см. рис. 1.57). Разобьем стержень на элементарные массы dm бесконечно малой длины , удаленные от оси вращения на расстояние . Введем понятие линейной плотности массы стержня , где m – масса стержня, – его длина, тогда элементарная масса , а момент инерции стержня будет равен
Рис. 1.57.

.
Учитывая, что , получим момент инерции однородного стержня относительно оси :
.
1.8.4.5. Теорема Штейнера
Как
правило, путем интегрирования легко
вычислить момент инерции I0
симметричного тела относительно оси,
проходящей через центр масс. Теорема
Штейнера позволяет найти момент инерции
относительно произвольной параллельной
оси. Она формулируется следующим образом:
Момент инерции относительно произвольной оси вращения равен сумме момента инерции тела относительно параллельной оси вращения, проходящей через центр инерции тела, и произведения массы этого тела на квадрат расстояния между осями.
Рис. 1.58.
.
Найдем момент инерции диска относительно оси, проходящей через его край перпендикулярно плоскости диска (рис. 1.58). В этом случае a = R и, согласно теореме Штейнера,
.
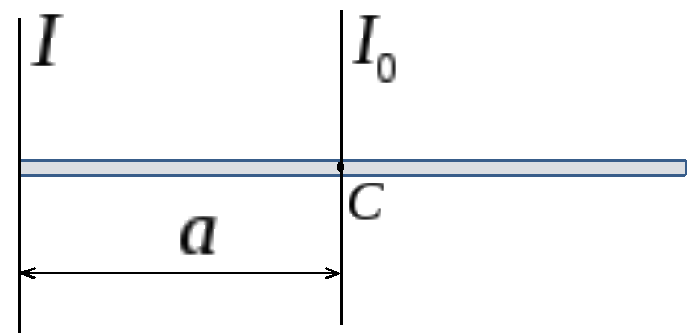
Теперь рассчитаем момент инерции стержня относительно оси, проходящей через центр инерции (середину) стержня. Относительно оси, проходящей через конец стержня . Расстояние между осями (рис. 1.59). Тогда по теореме Штейнера. Отсюда .
Рис. 1.59
Видим, что в любом случае момент инерции тела представляется в виде I = kmr2, где r – какой-либо характерный размер тела, а k – коэффициент пропорциональности, зависящий от формы тела. Единица измерения момента инерции – кг∙м2.