

4.2.4 Принцип суперпозиции электростатических полей.
Опыт показывает, что к кулоновским силам применим принцип независимости действия сил, т.е. результирующая сила F, действующая со стороны поля на пробный заряд Q0, равна векторной сумме сил Fi, приложенных к нему со стороны каждого из зарядов Qi
![]() (7)
(7)
Формула (7) выражает принцип суперпозиции(наложения) электростатических полей, согласно которому напряженность Е результирующего поля, создаваемого системой зарядов, равна геометрической сумме напряженностей полей, создаваемых в данной точке каждым из зарядов в отдельности.
Принцип суперпозиции позволяет рассчитать электростатические поля любой системы неподвижных зарядов, поскольку если заряды не точечные, то их можно всегда свести к совокупности точечных зарядов.
4.3 Построение математической модели
Рассмотрим модель движения частицы с зарядом q и массой m в кулоновском поле другой частицы с зарядом Q, положение которой фиксировано.
В системе координат, начало которой привязано к «большому» телу, уравнения модели в простейшем приближении имеют вид
Они получаются из
второго закона Ньютона и закона Кулона.
![]() = 0,85 . 10-12
ф/м ¾
электрическая постоянная. Знак «-»
в уравнениях для скорости соответствует
разноименно заряженным частицам; в
случае одноименных зарядов он меняется
на «+».
= 0,85 . 10-12
ф/м ¾
электрическая постоянная. Знак «-»
в уравнениях для скорости соответствует
разноименно заряженным частицам; в
случае одноименных зарядов он меняется
на «+».
Входные параметры модели:
· q и Q ¾ соответственно заряды движущейся и закрепленной частиц;
· m ¾ масса движущейся частицы;
· начальные координаты движущейся частицы;
· начальная скорость движущейся частицы либо угол прицеливания
Выходные параметры модели:
· время t
· координата х
· координата у
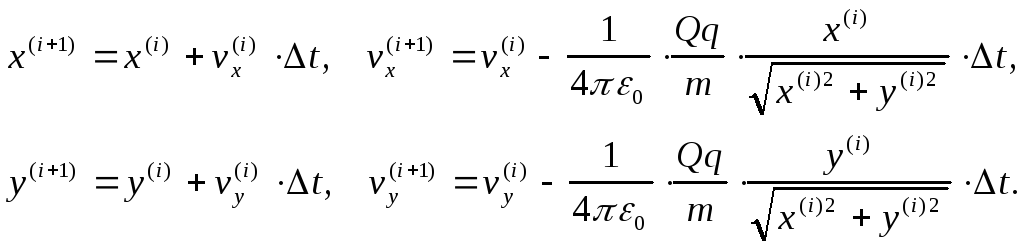
Исходя из выше приведенных формул, строим систему дифференциальных уравнений, отображающей положение движущейся частицы q в определенный момент времени, и ее скорость относительно двух перпендикулярных осей.

![]()
![]()
![]()
![]()
5. Реализация модели
Программная реализация модели производилась в среде разработки Delphi 7.0. В качестве метода решения системы дифференциальных уравнений был выбран метод Рунге-Кутта четвертого порядка.
5.1 Алгоритмы
5.1.1 Алгоритм вычисления положения тела

5.1.2 Алгоритм функции вычисления скоростей и координат

5.2 Руководство пользователя
При запуске перед пользователем открывается окно программы, на котором мы видим две панели. Одна панель служит для задания параметров модели, а на другой расположены функциональные кнопки. Для наглядности ниже панелей расположен рисунок.
Такие параметры как заряды, масса электрона, приращение заданы изначально и не могут меняться. Расстояния же между зарядами, высота мишени, начальная скорость частицы и угол прицеливания могут задаваться пользователем.
На правой панельке расположены следующие кнопки:
-
«Моделирование». Служит для моделирования системы после ввода всех параметров.
-
«Попасть». Служит для нахождения величины, по которой будет происходить подстройка.
-
«График». Служит для отображения результата в графическом виде.
-
«Таблица». Служит для отображения результата в виде таблицы.
Моделирование полета частицы происходит следующим образом:
-
Вводятся значения величин a, c, d.
-
Открывается окно «Попадание», в котором:
-
Выбирается величина, по которой будет происходить подстройка
-
вводится значение второй величины
-
При нажатии на кнопку «моделировать» рассчитывается значение выбранной величины.
-
Если вводятся значения, при которых попадание невозможно, то появляется сообщение, повествующее об этом.
-
Далее нажимается кнопка «Моделировать» в основном окне для, непосредственно, моделирования системы.
-
С результатами можно ознакомиться как с помощью строящегося графика, так и с помощью таблицы, в которую выводятся значения времени и координат частицы. Также имеется возможность сохранить результаты из таблицы в текстовый файл.