

Лабораторные работы / Кравченко УИТ 51 / 1 / Документ Microsoft Word
.docЦелью paбoты являются:
-
Изучение принципов построения и расчета комбинированных систем управления
-
Расчет параметров настройки КУ с учетом реализации узла нагрузки двигателя
На рисунке 1.1 представлена структурная схема регулирования скоростью вращения АД.

Регулируемая величина в установившемся режиме:

Установившаяся ошибка:

Построим систему с компенсацией основного возмущающего воздействия:

Найдем коэффициент К1 для КУ1:

Так как значение скорости определяется наличием двух сигналов U3 и Мс, то значение установившейся ошибки выразится как:

Эта формула получена из схемы для компенсации возмущающего воздействия:

При работе системы для реализации контура компенсации вместо информации о значении момента нагрузки Мс на валу двигателя в лабораторной установке может быть использована информация о значении тока в обмотках электромагнитного тормоза Iэм.
Рассчитаем коэффициент компенсации:

Теперь, учитывая влияние скорости вращения на момент нагрузки, запишем окончательную формулу для коэффициента K1:

На основании полученного результата, можно заключить, что для расчета К1 достаточно формулы, учитывающий коэффициент передачи между Мс и Iэм.
Теперь, модель, использующая КУ и коэффициентом К1 представим на рисунке:

Для компенсации установившейся ошибки от задающего воздействия, необходимо ввести еще одно компенсирующее устройство КУ2. Структурная схема замкнутой системы регулирования скорости с компенсацией задающего и возмущающего воздействия представлена на рисунке:
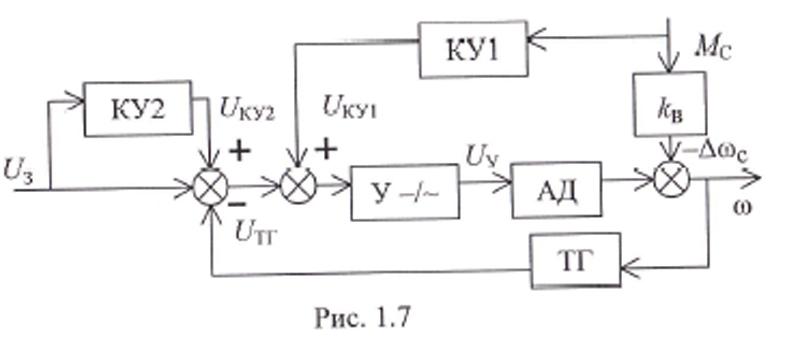
Положив Мс=0, рассмотрим значение установившейся ошибки системы регулирования от задающего воздействия. В соответствии с рисунком, запишем значение ошибки:

K2 из условий равности ошибки 0 равен 0,483
Вывод: в результате проведенных расчетов получили значения коэффициентов для КУ1 и КУ», которые компенсировали возмущающее воздействие Mc, а также входное возмущающее воздействие. К1 = 0,015, К2 = 0,483. таким образом мы не только свели к минимуму ошибку регулирования, но и путем уменьшения коэффициентов КУ добились повышения статической точности системы и как следствие – повысили ее устойчивость.