


Содержание Введение 4
1 Техническое задание на разработку системы автоматического
регулирования температуры в помещении свинарника 6
1.1 Цель курсовой работы 6
1.2 Технические характеристики системы регулирования 6
1.3 Функциональная схема системы регулирования 6
2 Выбор и обоснование выбора элементной базы локальной системы
управления 8
2.1 Выбор микропроцессора 8
2.2 Выбор вентилятора 9
2.3 Выбор двигателя 10
2.4 Выбор операционного усилителя 11
2.5 Выбор датчика температуры 12
2.6 Выбор датчика влажности 13
2.7 Выбор нагревательного элемента 14
3 Расчет датчика обратной связи 16
3.1 Расчет датчика температуры 16
3.2 Расчет датчика влажности 17
4 Анализ устойчивости системы 19
5 Построение и анализ логарифмической амплитудно-частотной
характеристики и логарифмической фазово-частотной характеристики
системы регулирования температуры в помещении свинарника 30
6 Построение и анализ желаемой логарифмической амплитудно-
частотной характеристики и желаемой логарифмической фазово-
частотной характеристики системы регулирования температуры
в помещении свинарника 33
7 Расчет и выбор корректирующего устройства 37
Заключение 43
Список использованных источников 44
ВВЕДЕНИЕ
Одним из основных факторов, влияющих на физиологическое состояние и продуктивность животных, является температурно-влажностный режим помещения.
Благоприятная температура — одно из необходимых условий для нормального течения обмена веществ в организме животных; нарушение же теплового режима отрицательно сказывается на проявлении всех жизненных процессов.
При низкой температуре увеличивается теплоотдача тела, вследствие чего животные усиленно потребляют корм, а при температуре ниже критической организм не успевает вырабатывать тепло за счет энергии корма, наступает переохлаждение, возможны простудные заболевания животных и даже смерть.
Известно, что у новорожденных поросят нет жировой подкожной прослойки и шерстного покрова. По сравнению с молодняком других видов животных они более чувствительны к холоду, так как рождаются с менее совершенной системой терморегуляции: физическая терморегуляция у них устанавливается только через 30 дней после рождения (например, при температуре окружающего воздуха от плюс 18 до плюс 20°С у поросят сразу же после рождения температура тела снижается на 1,5 ÷ 3°С). Первые два месяца поросята быстро растут, их масса увеличивается в 14 ÷ 16 раз, что, естественно, сопровождается высоким напряжением всех физиологических процессов в организме. Поэтому поддержание оптимальных температур для новорожденных поросят — одно из основных условий сохранения приплода зимой. Первые 15 дней в помещении (в зоне нахождения поросят) нужно поддерживать температуру в пределах от плюс 26 до плюс 30°С — здесь основное место отводится средствам локального обогрева. Переохлаждение животных также способствует возникновению инфекционных заболеваний.
Кроме того, при пониженной температуре увеличивается расход кормов на единицу продукции, у животных ухудшается аппетит, снижаются привесы и продуктивность. Так, в свинарниках при удовлетворительном кормлении животных, но при высокой влажности воздуха (80 ÷ 100%) и низкой температуре (от плюс 1 до плюс 8°С) по сравнению с оптимальными условиями (влажность воздуха 65 ÷ 80% и температура от плюс 8 до плюс 42°С) суточные привесы растущих свиней меньше на 9 ÷ 28%, а затраты корма составляют 6 ÷ 12 корм. ед. на 1 кг привеса (вместо 4,5 ÷ 5,5 корм.ед.); отход поросят-сосунов и отъемышей по отношению к общему поголовью на 12 ÷ 28% выше.
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА РАЗРАБОТКУ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ В
ПОМЕЩЕНИИ СВИНАРНИКА
1.1 Цель курсовой работы
Целью данной курсовой работы является разработка системы автоматического регулирования температуры в помещение свинарника. Данная система должна отвечать всем заданным в техническом задании параметрам, обеспечивая необходимое быстродействие, требуется, чтобы потребляемая мощность была минимальна.
1.2 Технические характеристики системы регулирования
Разрабатываемая система автоматического регулирования температуры в помещение свинарника, должна обеспечивать:
- диапазон рабочих температур, С от минус40 до плюс 50;
- перерегулирование, % 40;
- время регулирования, с 90;
- напряжение питающей сети, В 220;
- температура начала обогрева, С 8;
- чувствительность, С 1;
- влажность, % 90;
- колебательность 1,5;
- скорость опроса датчика, с-1 4;
- ускорение опроса, с-1 1;
- максимальная допустимая ошибка 4.
1.3 Функциональная схема системы регулирования
Работа системы автоматического регулирования температуры в поме-
щение свинарника заключается в поддержании заданных диапазонов регулируемых величин.
В соответствии с рисунком 1 система функционирует следующим образом: датчик температуры фиксирует температуру в помещение свинарника. На основании данных датчика микропроцессор вырабатывает напряжение, которое усиливается усилителем и поступает на электронагреватель. Электронагреватель осуществляет обогрев, и температура вновь фиксируется датчиком. Возмущающее воздействие влажности фиксируется датчиком влажности и корректируется работа системы.
![]()

МП – микропроцессор, У – усилитель напряжения, Д. – двигатель,
В – вентилятор, НЭ – нагревательный элемент, ДТ – датчик температуры,
ДВ – датчик влажности
Рисунок 1 – Функциональная схема системы автоматического
регулирования температуры в помещении свинарника
2 ВЫБОР И ОБОСНОВАНИЕ ВЫБОРА ЭЛЕМЕНТНОЙ БАЗЫ
ЛОКАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Выбор микропроцессора
Одним из главнейших устройств в любой САУ можно считать устройство сравнения, от точности, проведенной им операции будет зависеть, на сколько точным окажется управление. Таким образом, следует достаточно тщательно подойти к выбору этого элемента.
S7-300 - это микропроцессоры, предназначенные для решения широкого круга задач автоматического управления. Модульная конструкция, работа с естественным охлаждением, комбинированное использование систем локального и распределенного ввода-вывода, мощные коммуникационные возможности, множество функций, поддерживаемых на уровне операционной системы, удобство эксплуатации и обслуживания обеспечивают возможность получения рентабельных решений для построения систем управления в различных областях промышленного производства. Особенностью микропроцессора являются встроенные аналого-цифровой и цифро-аналоговый преобразователи. Исходя из требуемых технических характеристик и экономической эффективности, выбираем процессор S7-300.
Технические характеристики микропроцессора S7-300.
Максимальная тактовая частота, МГц 33.
ОЗУ для программ и данных, кб 32.
Время выполнения двоичных команд, мкс 0,6.
Счетчики/таймеры 2/64.
Цифровые входы/выходы 8/16.
Аналоговые входы/выходы 32.
Напряжение питания, В 5,5 ÷ 12.
Рабочий интервал температур, ºС от минус 55 до плюс 125.
Передаточная функция цифрового устройства микропроцессор является стандартной:
![]() .
.
2.2 Выбор вентилятора
Для охлаждения свинофермы необходимо подобрать тип вентилятора, который способен направлять поток воздуха на нагревательный элемент, достаточный чтобы не допустить перегрев элемента.
На основании вышесказанного выбираем центробежный вентилятор типа ВЭД – 1,5. Данный вентилятор обладает хорошей производительностью, сравнительно небольшой потребляемой мощностью.
Технические характеристики вентилятора.
Производительность, м3/ч 1,5 ÷ 4.
Полное давление, кГ/м2 60 ÷ 80.
Потребляемая мощность, кВт 1 ÷ 1,5.
Масса, кг 0,15.
Частота вращения, 1/мин 1500.
Постоянная времени вентилятора 0,5.
Мощность требуемого двигателя, кВт 4.
Передаточная функция вентилятора имеет вид:
![]() ,
(1)
,
(1)
где
![]() – постоянная времени вентилятора;
– постоянная времени вентилятора;
![]() –
коэффициент
передачи:
–
коэффициент
передачи:
![]() (2)
(2)
где p=80 кГ/м2 = 785 Па – полное давление;
ω=1500 об/мин = 25 об/с – скорость вращения вала двигателя.
Подставим численные выражения, получим передаточную функцию для вентилятора вида:
![]() .
.
2.3 Выбор двигателя
Для корректной работы вентилятора требуется двигатель постоянного тока мощностью не менее 4 кВт.
На основе этого выбираем исполнительный двигатель типа МИ-54.
Технические характеристики двигателя.
Мощность Рн, кВт 4,5.
Скорость вращения nн, об/мин 1500.
Напряжение Uн, В 220.
Ток якоря Iн, А 2,5.
Сопротивление цепи якоря Rд, Ом 0,26.
КПД ηд, % 85.
Момент инерции Jд, кгм2 0,15.
Передаточная функция исполнительного двигателя по углу поворота имеет вид (если пренебречь индуктивностью цепи якоря):
![]() ,
(3)
,
(3)
где kд - коэффициент усиления двигателя:
kд = ηн / Uн = 85/220 = 0,38, (4)
Тд - электромеханическая постоянная времени:
![]() ,
(5)
,
(5)
где
![]() ;
(6)
;
(6)
![]() ,
(7)
,
(7)
где ωн = πnн/30 – скорость вращения вала двигателя.
![]() (м-1),
(м-1),
![]() (В/рад).
(В/рад).
Рассчитаем электромеханическую постоянную времени:
![]() (с).
(с).
Следовательно, передаточная функция исполнительного двигателя равна:
![]() .
.
2.4 Выбор операционного усилителя
Выбор усилителя мощности производится по следующим показателям:
- вид входного и выходного сигнала, тип питания;
- требуемая мощность;
- надежность, независимость от внешних влияний (особенно коэффициента усиления), чувствительность, малые массогабариты.
Номинальная мощность усилителя должна удовлетворять неравенству:
Рун Рн / ηд ,
Исходя из того, что выходное напряжение микропроцессора равно 2В, выбираем высоковольтный и мощный операционный усилитель типа 157УД1.
Технические характеристики усилителя.
Напряжение питания, В ±2, ±20.
Входной ток, мА 0,5.
Выходное напряжение, В 220.
Входное сопротивление, МОм 1.
Скорость нарастания выходного напряжения, В/мкс 0,5.
Максимальный выходной ток, А 2.
Выходное сопротивление, Ом 10.
Постоянная времени тиристоров, с 0,003.
Также как и любое стандартное усилительное (пропорциональное звено), данный усилитель обладает постоянным передаточным числом:
![]() .
(8)
.
(8)
2.5 Выбор датчика температуры
Для корректной работы системы и поддержания заданной температуры в свинарнике, необходимо использование датчика температуры.
Так как система работает в нормальных условиях, то измерение большого перепада температур не требуется. На основании этого выбираем датчик температуры ТСМ-6114.
Технические характеристики прибора.
Погрешность прибора, С0 ±1,0.
Предел измеряемых температур, С0 от минус 50 до плюс 100.
Сопротивление датчика, Ом (при t=1000 ) 75,58.
Относительная влажность воздуха, % 30 ÷ 95.
Постоянная времени прибора , с 25.
Масса прибора, кг не более 0,3.
Число чувствительных элементов 1.
Напряжение питания, В 24.
Передаточная функция датчика температуры будет иметь вид:
![]() ,
(9)
,
(9)
где
![]() – постоянная времени прибора;
– постоянная времени прибора;
![]() – коэффициент
передачи:
– коэффициент
передачи:
![]() (10)
(10)
где R=76 Ом – сопротивление датчика;
Q=1000 С – верхний предел измерения температуры.
Тогда передаточная функция датчика температуры будет иметь вид:
![]() .
.
2.6 Выбор датчика влажности
Так как на систему действует возмущающее воздействие, то его необходимо учитывать для правильного функционирования системы. Для учета будем использовать сорбционно-емкостной датчик влажности Ива-6.
Технические характеристики прибора.
Диапазон измерения относительной влажности, % 0 ÷ 98.
Рабочий диапазон температур, 0С от минус 60 до плюс 60.
Температурный коэффициент датчика, % 0,07.
Постоянная времени, с не более 3.
Частота измерительного сигнала от 0 до 50.
Исходя из того, что график работы сорбционно-емкостного датчика влажности – линейная характеристика, передаточная функция будет иметь вид:
![]() , (11)
, (11)
где
![]() – постоянная времени прибора;
– постоянная времени прибора;
![]() – коэффициент
передачи:
– коэффициент
передачи:
![]() (12)
(12)
где γ – предельное значение влажности воздуха;
Uвых – выходное напряжение прибора.
Следовательно, передаточная функция датчика влажности будет иметь вид:
![]() .
.
2.7 Выбор нагревательного элемента
Для обогрева свинарника необходимо выбрать нагревательный элемент. Для этой цели наиболее удобно использовать нагревательные ленты ТЭН–100 А 13/3.5 Р220 УХЛ4.
Технические характеристики нагревательного элемента.
Номинальная мощность, Вт 3500.
Напряжение питания, В 220.
Постоянная времени, с 30.
Наружный диаметр оболочки, мм 13.
Развернутая длина, см 100.
Максимальный ток, А 2.
Верхний предел рабочей температуры, 0С 80.
Расчёт передаточной функции нагревательного элемента
Передаточная функция нагревательного элемента имеет вид:
![]() , (13)
, (13)
где
![]() – постоянная времени прибора;
– постоянная времени прибора;
![]() – коэффициент
передачи:
– коэффициент
передачи:
![]() , (14)
, (14)
где tmax – верхний предел рабочей температуры;
Uвх – входное напряжение:
![]() В, (15)
В, (15)
![]() .
.
Тогда передаточная функция нагревательного элемента будет иметь вид:
![]() .
.
В ходе анализа системы автоматического регулирования температуры помещения свинарника, была выбрана элементная база, которая представлена элементами: микропроцессор, вентилятор, нагревательный элемент, двигатель, датчик температуры, датчик влажности и операционный усилитель. Все элементы подобраны по справочной литературе, для них рассчитаны передаточные функции, включающие постоянные времени и коэффициенты передачи (усиления).
3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
3.1 Расчет датчика температуры
Для поддержания заданной температуры в свинарнике необходимо измерительное устройство, передающее сигнал микропроцессору. В качестве такого устройства взят датчик температуры ТСМ-6114.
Термометры сопротивления предназначены для измерения температуры в диапазоне от минус 200°С до плюс 600°С. Они бывают металлические и полупроводниковые. Для изготовления металлических термометров используется медь и платина. Медные термометры работают в диапазоне от 0°С до плюс 200°С. Градуировочная характеристика в этом достаточно узком диапазоне температур линейная
Rтс=R0 (1 + α∙T), (16)
где R0 – значение сопротивления при 0°С;
α = 0,486∙10-3 1/град – температурный коэффициент сопротивления или чувствительность термометра сопротивления;
T – температура в °С.
Конструкции термометров чрезвычайно разнообразны и определяются, главным образом, областью применения. Наиболее часто термометры сопротивления выполняются в виде бифилярной обмотки тонкого медного или платинового провода на диэлектрическом основании. Бифилярная обмотка необходима для получения безиндуктивного сопротивления. Для защиты от агрессивных сред, используются разнообразные чехлы из нержавеющей стали и других материалов, что увеличивает массу датчика и ухудшает его динамические характеристики.
Градуировочные характеристики платиновых термометров стабильны во времени и мало различаются от экземпляра к экземпляру. Медные термометры уступают платиновым с метрологической точки зрения, но вследствие их сравнительной дешевизны широко применяются, если соответствуют температурному диапазону и требованиям точности.
В результате расчета датчика построим статическую характеристику зави-
симости сопротивления датчика от температуры.
 R,
Ом
R,
Ом


 76,36
76,36
 76
76


0 8 10 t, °С
Рисунок 2 – Статическая характеристика датчика температуры
3.2 Расчет датчика влажности
Для контроля возмущающего воздействия влажности был выбран сорбционно-емкостной датчик влажности Ива-6.
Принцип действия сорбционно-емкостных датчиков влажности основан на зависимости диэлектрической проницаемости сорбента, используемого в качестве влагочувстительного слоя, от количества сорбированной влаги. Влагочувствительный слой располагается между двумя электродами, один из которых влагопроницаем, образуя конденсатор, емкость которого зависит от влажности окружающей среды. В датчиках относительной влажности наиболее часто применяют полярные полимерные сорбенты с линейными изотермами сорбции.
Максимальное значение ширины петли гистерезиса градуировочной характеристики датчика при его влагоциклировании от 0 до 98 % и обратно, имеющее место при 75 % не превышает 4 %. При эксплуатации датчика в более узком диапазоне изменения влажности величина гистерезиса значительно меньше. Так, в диапазоне 30 ÷ 70 % величина гистерезиса не превышает 1,5%. Релаксация гистерезиса во времени не наблюдается, что позволяет при необходимости вводить соответствующие поправки.
C,
пФ
220
200
180
160
0
10 20 30 40 50 60 70 80 90 γ, %


Рисунок 3 – Статическая характеристика датчика влажности
На основании полученных статических характеристик можно сделать вывод о том, что данные датчики подходят для системы.
4 АНАЛИЗ УСТОЙЧИВОСТИ СИСТЕМЫ
Преобразуем структурную схему данной системы и найдем общую передаточную функцию непрерывной части системы. Непрерывная часть системы включает в себя все элементы системы кроме микропроцессора.
Запишем передаточные функции каждого элемента системы:
![]() –микропроцессор;
–микропроцессор;
![]() –вентилятор;
–вентилятор;
![]() –двигатель;
–двигатель;
![]() –усилитель
напряжения;
–усилитель
напряжения;
![]() –датчик
температуры;
–датчик
температуры;
![]() –нагревательный
элемент;
–нагревательный
элемент;
![]() –датчик
влажности.
–датчик
влажности.
Выделим в структурной схеме изменяемую и неизменяемую части системы автоматического управления. Изменяемая часть состоит из ЭВМ, в состав которой входят микропроцессор, аналого-цифровой и цифро-аналоговый преобразователи. Неизменяемая часть состоит из всех остальных элементов системы. Для изменяемой части определим устойчивость по критерию Ляпунова, построим график переходного процесса системы, амплитудно-частотную характеристику системы, определим прямые и косвенные оценки качества системы. Для неизменяемой части определим устойчивость по критерию Шур-Кона, проведем z-преобразование для построения графика переходного процесса замкнутой системы и определим прямые оценки качества системы.
Структурная схема системы представлена на рисунке 4.
WДВ(p)


-



WУ(p)
WМП(p)
WДВ(p)
WВ(p)
WНЭ(p)
-







WДТ(p)


Рисунок 4 – Структурная схема системы автоматического регулирования
температуры в помещение свинарника
Преобразуем схему:

Получим функциональную схему вида:



W2(p)
WМП(p)
WНЭ(p)





-
WДТ(p)


Рисунок 5 – Преобразованная функциональная схема
Выполним дальнейшее преобразование:
![]()
Общая передаточная функция замкнутой системы будет иметь вид:
![]() (17)
(17)
Подставив
значения каждой из передаточных функций
в программе MathCAD,
получили значение
![]() :
:
![]() .
.
Проверим устойчивость системы по критерию устойчивости Ляпунова, который означает: если корни характеристического уравнения лежат в левой полуплоскости комплексной плоскости, то система является устойчивой.
Запишем характеристическое уравнение замкнутой системы:
![]() Найдем
корни характеристического уравнения
с помощью MathCAD:
Найдем
корни характеристического уравнения
с помощью MathCAD:
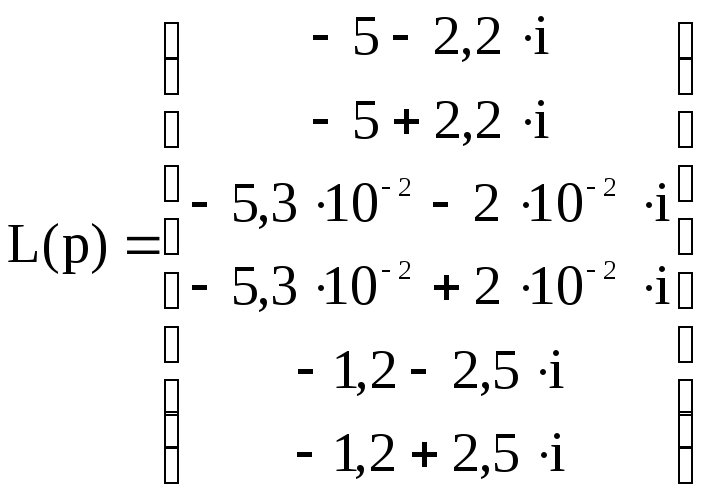 .
.
Изобразим полученные корни на комплексной полуплоскости (Рисунок 6). Для устойчивости системы достаточно, чтобы все они лежали в левой полуплоскости.
Так как все вещественные части корней отрицательны, то есть корни лежат в левой полуплоскости комплексной плоскости, то это означает, что система устойчива.
Im Re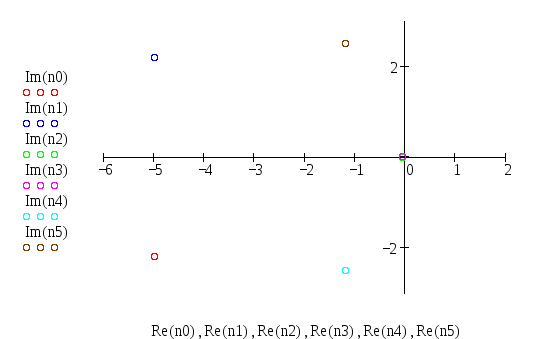


Рисунок 6 – Расположение корней на комплексной плоскости
Построение переходного процесса системы автоматического регулирования температуры в помещении свинарника выполняется на основе обратного преобразования Лапласа от передаточной функции системы автоматического регулирования в замкнутой форме. Преобразование по Лапласу от передаточной функции системы автоматического регулирования в замкнутой форме выполним с помощью программы MathCAD:
h(t)
1,4
hmax 1,2
1
hуст
0,8
0,6
0,4
0,2
0
