

2.4. Выбор закона управления
Потери энергии в технологическом процессе зависят от технологической нагрузки, определяемой потребителем, и потерь напора на оборудовании насосной станции которые определяются гидравлическим сопротивлением элементов схемы. Для организации технологического процесса с минимальными энергетическими потерями необходимо, в первую очередь, снизить потери напора между трубопроводом насосного агрегата и сетью потребителей. Кроме того, в процессе функционирования в зависимости от режимов работы системы может меняться давление перед насосом, создаваемое источником сырья. Такой характер взаимосвязи параметров требует установки в системе дроссельных регулирующих элементов - регулирующих клапанов (иногда их роль выполняют запорные задвижки агрегатов). Эти элементы создают дополнительное гидравлическое сопротивление и позволяют обеспечить стабильное давление в сетевом трубопроводе. При использовании дроссельных элементов происходит распределение напора на элементах системы.
На величину потерь при дроссельном регулировании влияет не только регулирующий элемент: чаще всего на этапе проектирования выбирается насосный агрегат с определённым запасом напора, а при замене насосных агрегатов новое оборудование может иметь несколько завышенные характеристики. Кроме того, диапазон изменения входных давлений (перед всасывающим патрубком насосного агрегата) оказывает влияние на величину давления за насосным агрегатом. Все эти обстоятельства приводят к тому, что потери энергии в ходе технологического процесса становятся достаточно большими, достигающими 45 и более процентов от номинальной мощности агрегата.
Для решения задачи минимизации потерь, связанных с регулированием давления в сети, необходимо исключить дополнительные гидравлические сопротивления на участке от насосного агрегата до сетевого трубопровода, то есть необходимо полностью открыть всю запорно-регулирующую арматуру. Это можно сделать, если процесс регулирования давления передать насосному агрегату. Теория работы нагнетателей (насосов и вентиляторов) доказывает, что изменение частоты вращения привода нагнетателя изменяет его напорные характеристики, кроме того, напор создаваемый нагнетателем, пропорционален квадрату частоты вращения агрегата.
Если организовать работу привода насосного агрегата таким образом, чтобы он при изменении параметров технологического процесса (расхода в сети и давления на входе агрегата) изменял частоту вращения, то в итоге можно без существенных потерь энергии стабилизировать давление в сети потребителей. При таком способе регулирования исключаются потери напора (нет дроссельных элементов), а значит, и потери гидравлической энергии.
Способ регулирования давления в сети путём изменения частоты вращения привода насосного агрегата снижает энергопотребление ещё и по другой причине. Собственно насос как устройство преобразования энергии имеет свой коэффициент полезного действия - отношение механической энергии, приложенной к валу, к гидравлической энергии, получаемой в напорном трубопроводе насосного агрегата.
В соответствии с теорией подобия максимум коэффициента полезного действия с уменьшением частоты вращения несколько снижается и смещается влево. Анализ требуемого изменения частоты насосного агрегата при изменении расхода в сети показывает, что с уменьшением расхода требуется снижение частоты вращения. В этом случае КПД насоса выше, чем при работе на номинальной частоте вращения. Таким образом, снижение частоты вращения в соответствии с технологической нагрузкой позволяет не только экономить потребляемую энергию за исключением гидравлических потерь, но и получить экономический эффект за счёт повышения коэффициента полезного действия самого насоса - преобразования механической энергии в гидравлическую.
Применение частотного регулирования приводов позволяет существенно уменьшить и эксплуатационные затраты, связанные с обслуживанием агрегатов и систем. Например, снижение перепада давления между всасывающим и напорным патрубками насосного агрегата увеличивает срок службы сальниковых уплотнений, практически исключая гидроудары и обеспечивает стабильность давлений в трубопроводах сетей, а также минимизирует затраты на обслуживание.
Технология управления асинхронными двигателями, обеспечивающая энергосбережение, обусловлена их конструктивными особенностями и техническими параметрами, а также характеристиками нагрузки.
Ниже, на рис. 2.2. приведены механические характеристики асинхронного электродвигателя – зависимость тягового момента двигателя от частоты его вращения при различных частотах питающего напряжения. При этом, для обеспечения согласования нагрузок, напряжение питания уменьшается пропорционально частоте. Как видно из рисунка, при питании двигателя от сети переменного тока с постоянной частотой пусковой момент двигателя значительно меньше его номинального значения в рабочем режиме. Использование режима изменения частоты питающего напряжения позволяет обеспечить номинальный момент вращения практически независимо от частоты вращения вала. В то же время, снижение напряжения питания обеспечивает уменьшение потребляемого тока и, соответственно, экономию электроэнергии.
На рисунке также показано изменение механических характеристик двигателя при уменьшении питающего напряжения на 20% и неизменной частоте переменного тока.
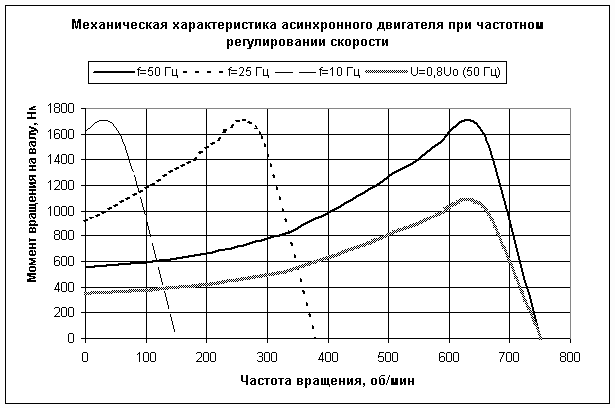
Рис. 2.2. Механические характеристики асинхронного двигателя при частотном регулировании
Использование частотно-регулируемого электропривода в насосных станциях по перекачке жидкости имеет ряд отличительных особенностей, связанных с массовым использованием центробежных конструкций насосов, которые отличаются тем, что для них расход пропорционален частоте оборотов крыльчатки, давление пропорционально квадрату числа оборотов, а потребляемая мощность – кубической степени. В соответствии с формулами приведения центробежных насосов эти параметры эмпирически можно выразить следующим образом:
Q/Q0 = n/n0, H/H0 = (n/n0)2, N/N0 = (n/n0)3, (2.1)
где Q – расход, n – частота вращения, Н – напор, N – мощность потребляемая электродвигателем.
Энергия, потребляемая электродвигателем из сети, прямо пропорциональна произведению расхода на перепад давления на насосе:
![]() ,
(2.2)
,
(2.2)
где ηн – КПД насоса (ηн = 0,75–0,85).
Исходя из этого, выбираем электропривод с частотным управлением.
Скорость вращения электромагнитного поля статора трехфазных электродвигателей переменного тока, пропорциональна частоте питающей сети, что позволяет регулировать их скорость плавным изменением частоты напряжения статора. Это наиболее экономичный способ плавного регулирования скорости асинхронных короткозамкнутых двигателей, поскольку двигатель во всем диапазоне регулирования работает с малой величиной скольжения ротора (малыми потерями скольжения).
Так как величина индуктивного сопротивления двигателя пропорциональна частоте, то для сохранения тока и других переменных двигателя такими же, как и при номинальной частоте, необходимо одновременно с изменением частоты изменять и напряжение питающей сети. Академиком М. П. Костенко сформулирован закон, устанавливающий соотношение между частотой и напряжением питания асинхронного двигателя:
![]() (2.3)
(2.3)
Приняв, что момент пропорционален квадрату скорости вращения, которая в свою очередь пропорциональна частоте, из условия постоянства перегрузочной способности можно установить соотношение между частотой и напряжением:
 .
(2.4)
.
(2.4)
Это соотношение является приближенным, так как оно не учитывает падения напряжения на активном сопротивлении обмоток статора.
Частотное управление двигателями переменного тока является экономичным, поскольку оно позволяет сохранить высокий к. п. д. двигателя, обеспечивает как двигательные, так и тормозные режимы работы, хорошую жесткость характеристик и, что самое главное, позволяет использовать в качестве приводного асинхронный короткозамкнутый двигатель.