

5 Построение логарифимческой амплитудно-частотной и фазо-частотной характеристик системы и их анализ
Построим ЛАЧХ САУ процессом полива газона. Для этого разомкнем структурную схему по главной обратной связи.

Рисунок 8 – Структурная схема разомкнутой САУ процессом полива газона
На рисунке 8 отображена структурная схема системы автоматического полива газона. Найдем передаточную функцию системы в разомкнутом виде:
 .
(19)
.
(19)
Подставив полученные ранее передаточные функции всех элементов системы и упростив выражение с помощью программы MathCadполучим:
 .
.
Z-преобразование проведем по формуле:
С
помощью программы MathLabнайдем от передаточной функции
от передаточной функции![]() :
:
>> W=tf([0.000952 0.00119],[4 -204.48 -261.85 0])
Transfer function:
0.000952 s + 0.00119
---------------------------
4 s^3 - 204.5 s^2 - 261.9 s
>> W=c2d(W,1.5)
Transfer function:
1.133e027 z + 6.534e044
---------------------------------
z^2 - 1.306e034 z + 1.306e034
Sampling time: 1.5
В конечном итоге получим:

Далее
необходимо перейти к псевдочастоте.
Для этого производится замена
![]() ,
а затем замена
,
а затем замена![]() ,
где
,
где![]() - период дискретизации системы (ранее
был принят за 1.5). В итоге получим:
- период дискретизации системы (ранее
был принят за 1.5). В итоге получим:

Построим ЛАЧХ по полученной передаточной функции псевдочастот в программе MathLab:
>> W=tf([0.196*10^36 -0.262*10^36 0.348*10^36 -0.456*10^36],[3 12 0.278*10^36 -0.371*10^36])
Transfer function:
1.96e035 s^3 - 2.62e035 s^2 + 3.48e035 s - 4.56e035
----------------------------------------------------------
3 s^3 + 12 s^2 + 2.78e035 s - 3.71e035
>> margin(W), grid
-90
60
40
20
0
-20
-40
-180
-270
10-3
10-2
10-1
100
101
102
103
-360
w,
рад/с
А,
дБ
φ,
°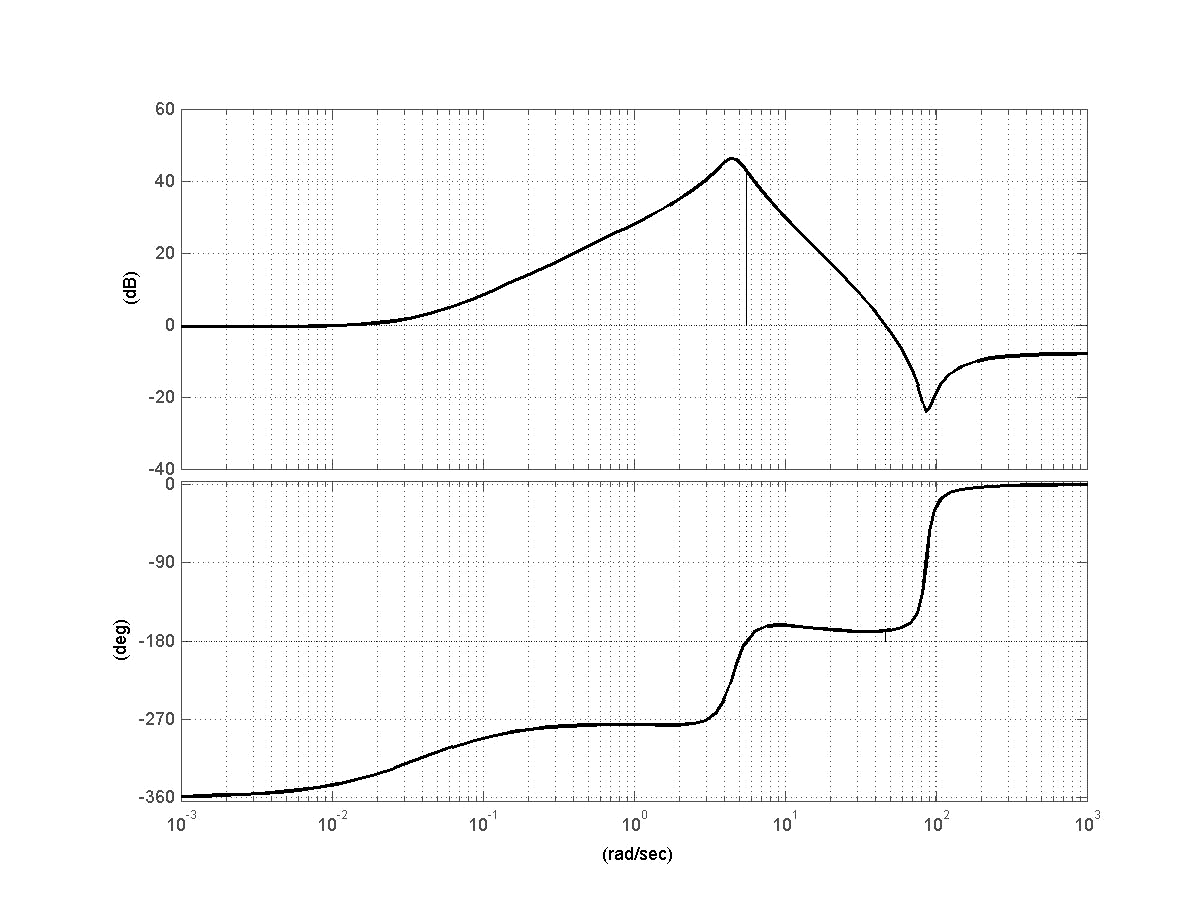




Рисунок 7 – ЛАЧХ и ЛФХЧ САУ процессом полива газона
По данному рисунку видно, что в рассматриваемой системе существует запасы по амплитуде (42,8дБ), и запас по фазе (11,4°), что вполне удовлетворяет поставленным перед системой задачам, следовательно стоит сделать вывод, что данная система не нуждается в коррекции.
ЗАКЛЮЧЕНИЕ
В данной курсовой работе была спроектирована и разработана система автоматического управления процессом полива газона. Были выбраны необходимые элементы системы, посчитаны их передаточные функции.
Производилась проверка системы на устойчивость и коррекция системы последовательным корректирующим устройством для обеспечения лучших параметров работы и усиления мощности сигнала. Оценка показателей качества показала, что система не нуждается в дальнейшей коррекции рассчитанные показатели удовлетворяют необходимым условиям.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Архаров М.А. Теплотехника. –М.: Высшая школа, 1985.
2. Брофеев Ю.И. Импульсная техника. -М.: Высшая школа, 1984.
3. Р.Ли Оптимальные оценки, определение характеристик и управление. -М.: Наука, 1966.
4. Справочное пособие по теории систем автоматического регулирования и управления под ред. Е.А.Санковского – Минск: Высшая школа, 1973.
5. Айзерман М. А. Теория автоматического регулирования. 2-е изд. М.: Наука, 1966.- 452 с.
6. Брайсон, Хо Ю-Ши. Прикладная теория оптимального управления: Пер. с англ. М.: Мир, 1972.- 544 с.
7. Воронов А. А. Введение в динамику сложных управляемых систем. М.: Наука, 1985.- 351 с.
8. Иващенко Н. Н. Автоматическое регулирование. Теория и элементы систем. 4-е изд. М.: Машиностроение, 1978.- 736 с.
9. Красовский А. А., Поспелов Г. С. Основы автоматики и технической кибернетики. М. - Л.: Госэнергоиздат, 1962.- 600 с.
10. Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. – М.: Энергоиздат, 1988 г.
11. Топчеев Ю.И. Учебное пособие для вузов. Атлас для проектирования систем автоматического регулирования. – М.: машиностроение, 1989. - 752 с.
12. Хвощ С.Т., Варлинский Н.Н., Попов Е.А. Справочник. Микропроцессоры и микро ЭВМ в системах автоматического управления. – Ленинград: Машиностроение, 1987.
13. Цыпкин Я. 3. Основы теории автоматических систем. М.: Наука, 1977.- 560 с.