

Реальная частота ω и псевдочастота λ связаны соотношением:
![]() (30)
(30)
где Т0 - период дискретизации и равен 0,01 секунды
λ=200·tg(0,005ω)
Выразим ω через λ:
ω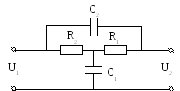 =F(λ)=200·tg(0,005λ)
Подставляя значения λ в выражение
( ), приходим к выводу, что ω=λ. Следовательно,
ЛАЧХ корректирующего звена справедлива
и для реальной частоты ω. По виду ЛАЧХ
выбираем само корректирующее звено.
Его вид изображен на рисунке 12.
=F(λ)=200·tg(0,005λ)
Подставляя значения λ в выражение
( ), приходим к выводу, что ω=λ. Следовательно,
ЛАЧХ корректирующего звена справедлива
и для реальной частоты ω. По виду ЛАЧХ
выбираем само корректирующее звено.
Его вид изображен на рисунке 12.
Рисунок 12 – Схема корректирующего устройства
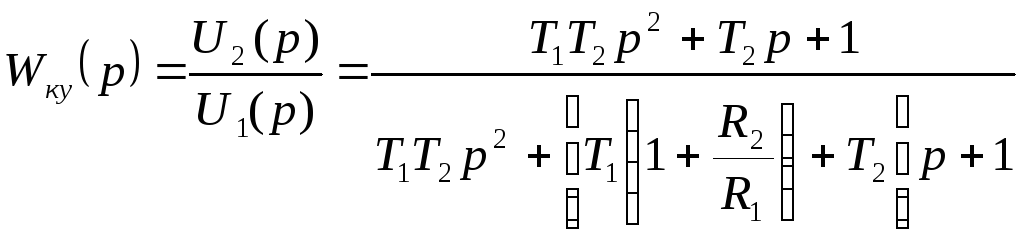
Передаточная функция корректирующего звена:
 (31)
(31)
![]() (32)
(32)
![]() (33)
(33)
Из графика ЛАЧХ корректирующего устройства определим все частоты излома:
λ1=0,6 с -1
λ2=7,042 с -1
λ3=178,57 с -1
λ4=454,545 с -1
Постоянные времени, соответствующие этим частотам:
![]()
![]()
![]()
![]()
Задаемся значениями:
R1=R2 =1000 Ом
Тогда:
![]()
![]()
Подставляя все найденные параметры в выражение для передаточной функции корректирующего устройства (31) получаем передаточную функцию в следующем виде:
 (34)
(34)
8 СИНТЕЗ ПРОГРАММНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА

Выполним обратное z-преобразование для Wку. Для этого необходимо применить подстановку:
![]()
![]()
Перейдем от – преобразования к z – преобразованию, осуществив следующую подстановку:
![]()
![]() (35)
(35)
По формуле (35) найдем разностное уравнение в реальном масштабе времени, введя в числитель дополнительный сдвиг на z-1:
![]() (36)
(36)
Уравнение (36)описывает работу корректирующего устройства. Так как в САУ изначально присутствует микропроцессорное устройство, напишем для него программу коррекции, соответствующую уравнению (36).
Блок-схема программы коррекции приведена на рисунке 13.
Сначала в программе задаются в форме строки постоянные коэффициенты А1, А2,…А6 уравнения (36).Выходной сигнал коррекции устанавливается равным нулю. Задается число повторений цикла, равное числу постоянных коэффициентов Аi. В порт поступает значение Uki, которое считываются микропроцессором. Происходит умножение значения Uki на первый коэффициент в строке. Результат складывается со значением сигнала на выходе. Далее происходит переход в начало цикла. После его завершения микропроцессорное устройство выдает выходной управляющий сигнал.
Программа коррекции написана на языке Assembler, ее листинг приведен ниже.
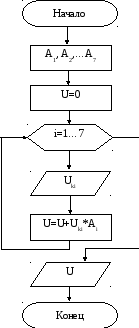
Рисунок 13 – Блок-схема программы коррекции
Листинг программы коррекции:
data
A dw ‘-2,68 -2,68 2,68 0,93 -0,05 -0,93 0,05 ’
U(k-1) db 0
U(k-2) db 0
U(k-2) db 0
U1(k-1) db 0
U1(k-2) db 0
U1(k-3) db 0
U1(k-4) db 0
i port equ 7h
port equ 8h
code
assume ds: @data
start
xor ex,ex
xor cx,cx
mov cx,7
cycl
in ax, i port
mov bx,@data
mov ds,bx
mul ax,ds
add ex,ax
dec cx
jne cycl
jcxz exit
exit.