

Реальная частота ω и псевдочастотаλсвязаны соотношением:
![]() (106)
(106)
где Т0 - период дискретизации и равен 0,01 секунды, подставляя в выражение (106) получаем:
λ=200·tg(0,005ω) (107)
Выразим ω через λ:
ω=F(λ)=200·tg(0,005λ) (108)
П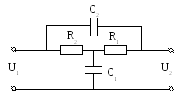 одставляя
значения λ в выражение (103), приходим к
выводу, что ω=λ. Следовательно, ЛАЧХ
корректирующего звена справедлива и
для реальной частоты ω. По виду ЛАЧХ
выбираем само корректирующее звено.
Его вид изображен на рисунке 14.
одставляя
значения λ в выражение (103), приходим к
выводу, что ω=λ. Следовательно, ЛАЧХ
корректирующего звена справедлива и
для реальной частоты ω. По виду ЛАЧХ
выбираем само корректирующее звено.
Его вид изображен на рисунке 14.
Рисунок 14 – Схема корректирующего устройства
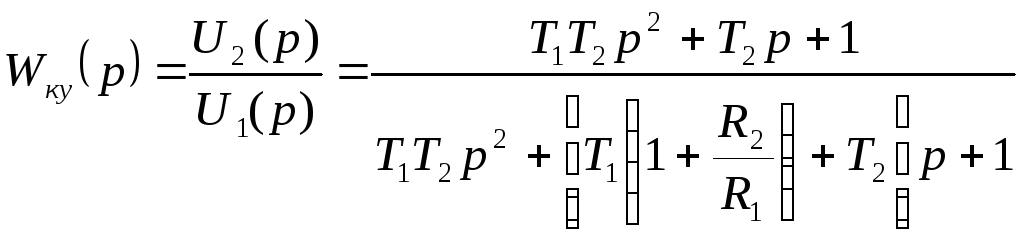
Передаточная функция корректирующего звена:
 (109)
(109)
![]() (110)
(110)
![]() (111)
(111)
L0=1
L∞=1
И з
графика ЛАЧХ корректирующего устройства
определим все частоты излома:
з
графика ЛАЧХ корректирующего устройства
определим все частоты излома:
λа=0,6 с -1 (112)
λв=7,042 с -1 (113)
λ1=178,57 с -1 (114)
λ2=454,545 с -1 (115)
Постоянные времени, соответствующие этим частотам:
![]() (116)
(116)
![]() (117)
(117)
![]() (118)
(118)
![]() (119)
(119)
Задаемся значениями:
R1=R2 =1000 Ом
Тогда:
![]() (120)
(120)
![]() (121)
(121)
Подставляя все найденные параметры в выражение для передаточной функции корректирующего устройства (104) получаем передаточную функцию в следующем виде:
 (122)
(122)
8Установка корректирующего устройства в систему
К орректирующее
устройство, реализованное наR-С-цепочке,
устанавливаем в систему после усилителя.
Выбор именно этого места обосновывается
тем, что, так как поступающий с
микропроцессора и датчика сигнал слишком
мал, а R-С-цепочки вносят на определенной
полосе частот значительные искажения
в электрический сигнал малой мощности.
Поэтому единственным местом в системе,
куда целесообразно установить
корректирующее устройство, является
электрическая цепь после усилителя.
Структурная схема скорректированной
системы изображена на рисунке 15.
орректирующее
устройство, реализованное наR-С-цепочке,
устанавливаем в систему после усилителя.
Выбор именно этого места обосновывается
тем, что, так как поступающий с
микропроцессора и датчика сигнал слишком
мал, а R-С-цепочки вносят на определенной
полосе частот значительные искажения
в электрический сигнал малой мощности.
Поэтому единственным местом в системе,
куда целесообразно установить
корректирующее устройство, является
электрическая цепь после усилителя.
Структурная схема скорректированной
системы изображена на рисунке 15.
Рисунок 15 – Структурная схема скорректированной системы
Таким образом, исходя из графика ФЧХ, определим запасы устойчивости по фазе и по амплитуде. Запас устойчивости по фазе составляет 22,7°. Запас устойчивости по амплитуде составляет -12 дБ. Запасы устойчивости удовлетворяют требованиям, предъявляемым к системе. Следовательно, коррекция проведена удачно.
9 СИНТЕЗ ПРОГРАММНОГО КОРРЕКТИРУЮЩЕГО
УСТРОЙСТВА
СИНТЕЗ ПРОГРАММНОГО КОРРЕКТИРУЮЩЕГО
УСТРОЙСТВА

Выполним обратное z-преобразование для Wку: X(z) x(t). Для этого необходимо применить подстановку:
![]()
![]() (123)
(123)
Перейдем от – преобразования к z – преобразованию, осуществив следующую подстановку:
![]() (124)
(124)
![]() (125)
(125)
По формуле (125) найдем разностное уравнение в реальном масштабе времени, для этого введем в числитель дополнительный сдвиг на z-1:
![]()
(126)
По уравнению (126) реализуем программу коррекции на языке Ассемблер.
;Расчет разностного уравнения
;
![]()
;![]() – входной сигнал
– входной сигнал
;![]() – выходной сигнал
– выходной сигнал
i_port EQU 11h; номер порта для чтения
o_port EQU 12h; номер порта для записи
А 1
EQU 2,68;
1
EQU 2,68;
A2 EQU 2,68;
A3 EQU -2,68;
B1 EQU 0,933;
B2 EQU –0,053;
B3 EQU –0,933;
B4 EQU 0,053;
![]() 1,
1,
![]() 2DB
0; выделение памяти под
2DB
0; выделение памяти под
;переменные
![]() (k-1),
(k-1),
![]() (k-2),
(k-2),
![]() (k-3)
(k-3)
![]() 1,
1,
![]() 2,DB
0; выделение памяти под
2,DB
0; выделение памяти под
;
переменные
![]() (k-1),
(k-1),
![]() (k-2),
(k-2),
![]() (k-3),
(k-3),
![]() (k-4)
(k-4)
;вычисляем значение выражения
![]() (k)=A1*
(k)=A1*![]() 1+A2*
1+A2*![]() 2+A3*
2+A3*![]() 3+B1*
3+B1*![]() 1+B2*
1+B2*![]() 2+B3*
2+B3*![]() 3+B4*
3+B4*![]() 4
4
start: ;метка начала цикла коррекции
in al, I_port; чтение данных из порта
mov
al,A1;
вычисление слагаемого А1*![]() 1
1
mov bl, al; сохранение результата в bl
;
в результате имеем А1*![]() 1
в регистреbl
1
в регистреbl
mov
al,
![]() 2;
вычисление
2;
вычисление
mul
al,
A2;
слагаемого А2*![]() 2
2
mov
al,
![]() 3;
вычисление
3;
вычисление
mul
al,
A3;
слагаемого А3*![]() 3
3
add bl, al; вычисление из предыдущего результата
;
в результате имеем А1*![]() 1+А2*
1+А2*![]() 2+А3*
2+А3*![]() 3
в регистреbl
3
в регистреbl
mov
al,
![]() 1;
вычисление
1;
вычисление
mul
al,
B1;
слагаемого B1*![]() 1
1
add bl, al; вычисление из предыдущего результата
m ov
al,
ov
al,
![]() 2;
вычисление
2;
вычисление
mul
al,
B2;
слагаемого B2*![]() 2
2
add bl, al; вычисление из предыдущего результата
mov
al,
![]() 3;
вычисление
3;
вычисление
mul
al,
B3;
слагаемого B3*![]() 3
3
add bl, al; вычисление из предыдущего результата
mov
al,
![]() 4;
вычисление
4;
вычисление
mul
al,
B4;
слагаемого B4*![]() 4
4
add bl, al; вычисление из предыдущего результата
; в регистре bl имеем результат вычисления всего выражения
mov
![]() 4,
4,![]() 3,
3,![]() 2,
2,![]() 1;
для следующего
1;
для следующего
mov
![]() 1,bl;
такта
1,bl;
такта
mov
![]() 3,
3,![]() 2,
2,![]() 1;
1;
mov
![]() 1,
1,![]() ;
;
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы




![]()
uk-1=0;
uk-2=0;
uk-3=0;
uk-4=0;![]() k-1=0;
k-1=0;
![]() k-2=0;
k-2=0;
![]() k-3=0;
k-3=0;




uk-4=uk-3;
uk-3=uk-2;
uk-2=uk-1;
uk-1=uk;![]() k-3=
k-3=![]() k-2;
k-2;
![]() k-2=
k-2=![]() k-1;
k-1;
![]() k-1=
k-1=![]() k;
k;



Рисунок 16 - Блок – схема алгоритма коррекции
З АКЛЮЧЕНИЕ
АКЛЮЧЕНИЕ
В данном курсовом проекте была спроектирована и разработана система автоматического регулирования объемным гидроприводом. Были выбраны необходимые элементы системы, посчитаны их передаточные функции.
Производилась проверка системы на устойчивость и коррекция системы последовательным корректирующим устройством для обеспечения лучших параметров работы и усиления мощности сигнала. Оценка показателей качества показала, что система не нуждается в дальнейшей коррекции. Рассчитанные показатели удовлетворяют необходимым условиям.
С ПИСОК
ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
ПИСОК
ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
Башта Т.М. Справочное пособие. Машиностроительная гидравлика. – М.: машиностроение, 1971. Изд.-е 2-е.
Берг А.И., Трапезников В.А. Энциклопедия современной техники. – Т.: 1,3
Богданович Л.Б. Гидравлические приводы. – К.: высшая школа. Головное изд.-во, 1980 - 232с.
Вакина В.В., Денисенко И.Д., Столяров А.Л. Машиностроительная гидравлика (примеры расчетов). – Киев: Высш. шк., 1987.
Вилнер Я.М., Ковалев Я.Т., Некрасов Б.Б.Справочное пособие по гидравлике, гидромашинам и гидроприводам. – Под редакцией д.-ра тех. наук, проф. Некрасов Б.Б. – Изд.-во «Высшая школа», Минск, 1976.
Воронов А.А.., Титов В.К., Новогранов Б.Н. основы теории автоматического регулирования и управления. – М.: Высшая школа, 1977 г.
Гаврилов А.Н. Приборостроение и средства автоматики. – М.: Машиностроение, 1964 г.
Домачев Ф.М., Лейко. Основы гидравлики и гидропривод. - М.: Стройиздат, 1981-183с.
Ермолин Расчет электрических машин, М., 1967.
Иващенко Н.Н. Теория и элементы систем. Автоматическое регулирование. – Изд.-е 4-е, перераб. и доп. М. Машиностроение, 1978.
Лопухина Е.М. Расчет микромашин, М., 1967.
Медведев В.Ф. Гидравлика и гидравлические машины. – Минск: Высш.шк., 1998.
Навроцкий К.Л. Теория и проектирование гидро- и пневмоприводов. - М.: Машиностроение, 1991-384с.
Некрасов Б.Б. Справочное пособие по гидравлике, гидромашинам и гидроприводам. – Минск: Высш.шк., 1985.
Под ред. проф. Константинова Н.М., Примеры гидравлических расчетов. Изд.-е 3, перераб. и доп. – М.:Транспорт, 1987.
П
 од
редакцией проф. Нетушила А.В. Справочное
пособие по основам электротехники и
электроники. – М.: Энергоатомиздат,
1995 - 352с.
од
редакцией проф. Нетушила А.В. Справочное
пособие по основам электротехники и
электроники. – М.: Энергоатомиздат,
1995 - 352с.Под ред. проф. докт. Профоса П. Справочник. Измерение в промышленности. – М.: «Металлургия», 1990.
Попов Д.Н. Динамика и регулирование гидро – и пневмосистем. – М.: машиностроение, 1987.
Савин И.Ф., Сафонов П.В. Основы гидравлики и гидропривод. – М.: Высш.школа, 1978.
Солодовников В.В. Элементы систем автоматического регулирования. – Т.2, Ч.1, Гл.IX, § 2-4. Машгиз, 1959.
Справочник. Под ред. проф. д.-ра техн. Наук Тайца Б.А. Приборостроение и средства автоматики. – М.: Машиностроение, 1964 (Т 4).
Справочник. Под ред. Черенова В.В. Промышленные приборы и ср.-ва автоматизации. – Ленинград: Машиностроение, 1987.
Справочные материалы. Автоматические приборы и регуляторы. - М.: Машиностроение, 1964.
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. – М.: Энергоиздат, 1988 г.
Топчеев Ю.И. Учебное пособие для вузов. Атлас для проектирования систем автоматического регулирования. – М.: машиностроение, 1989 - 752 с.
Федорец В.А., Педченко М.Н., Пичко А.Ф., Пересадько Ю.В., Лысенко В.С. Гидроприводы и гидропневмоавтоматика станков. – Киев, 1987.
Хвощ С.Т., Варлинский Н.Н., Попов Е.А. Справочник. Микропроцессоры и микро ЭВМ в системах автоматического управления. – Ленинград: Машиностроение, 1987.
Хрущев Электрические микромашины, Л., 1969.
Шендлер Ю.И. Справочник – автоматизация, приборы контроля и регулирования. – М.:Изд.-во “Недра”, 1967, кн.5.
Якубовский С.В. Справочник. Цифровые и аналоговые интегральные микросхемы. – М.: Радио и связь, 1989 - 496с.