

5 Построение лачх системы и ее анализ
Для построения ЛАЧХ необходимо разомкнуть главную обратную связь. Но так как в данной системе невозможно этого сделать, следовательно, необходимо использовать прежнюю передаточную функцию. Структурная схема данной системы приведена на рисунке 9.
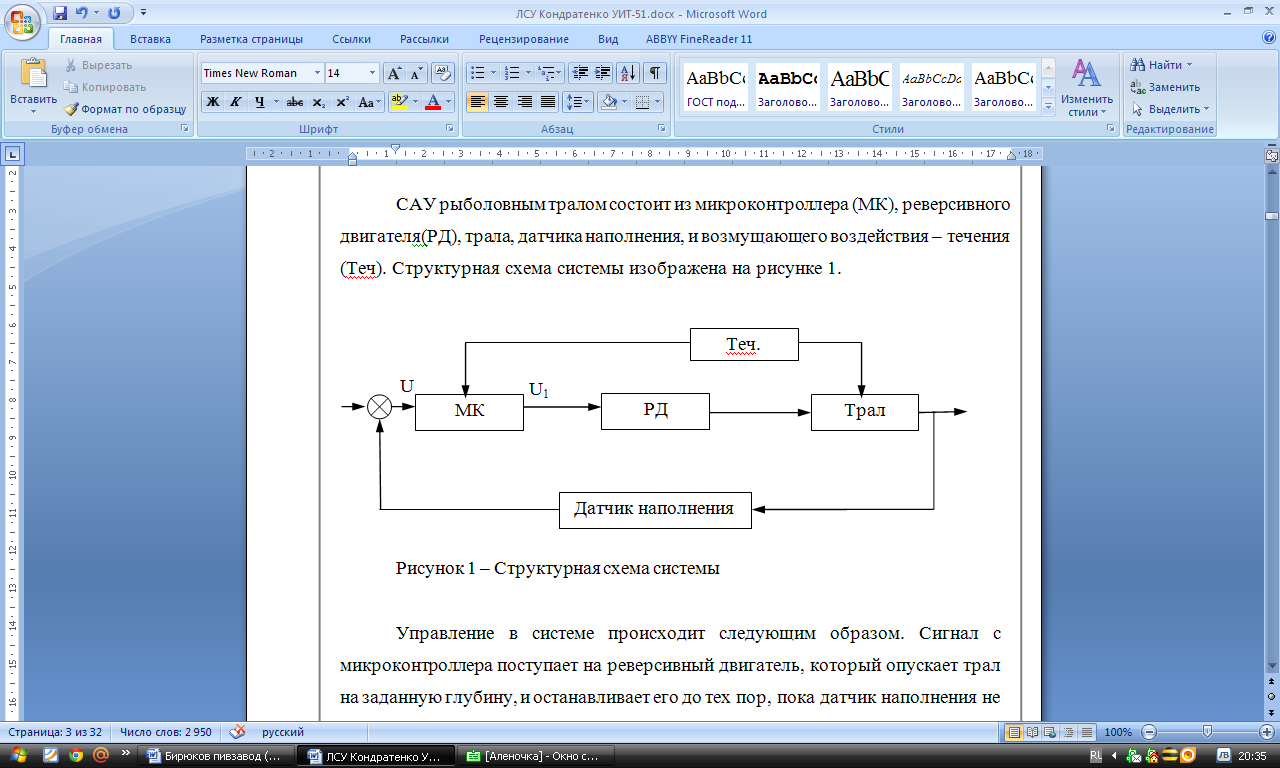
Рисунок 9 – Функциональная схема системы автоматического управления
рыболовным тралом
Передаточную функцию системы:
 (17)
(17)
Z-преобразование передаточной функции с учетом фиксатора нулевого порядка.
 (18)
(18)
Для
построения ЛАЧХ и ЛФЧХ необходимо
осуществить
 преобразование, в котором заменяем
преобразование, в котором заменяем
 . Следующим этапом переходим к абсолютной
псевдочастоте, заменяя
. Следующим этапом переходим к абсолютной
псевдочастоте, заменяя ,
при Т0=30
c.
Полученная передаточная функция примет
вид:
,
при Т0=30
c.
Полученная передаточная функция примет
вид:
 (19)
(19)
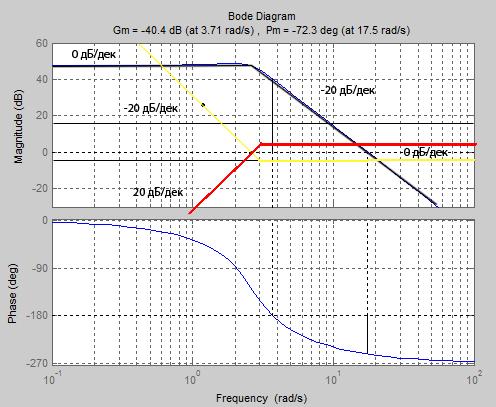
По данной передаточной функции построим ЛАЧХ и ЛФЧХ. ЛАЧХ и ЛФЧХ проектируемой системы будет иметь вид соответствующий рисунку 10.
Аппроксимируем полученную ЛАЧХ. Передаточная функция аппроксимированной ЛАЧХ примет вид:
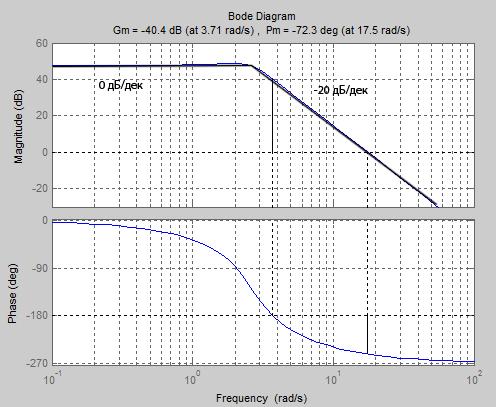

Рисунок 10 - Логарифмическая амплитудно-частотная характеристика и логарифмическая фазо-частотная характеристика системы
Составим передаточную функцию по аппроксимированной ЛАЧХ:
 . (20)
. (20)
Определим постоянные времени и коэффициент усиления:
k=110,


 11,1
с,
11,1
с,
 .
.
Согласно полученным числовым значениям передаточная функция аппроксимированной ЛАЧХ:
 (21)
(21)
Определим запасы устойчивости: запас по амплитуде А=2,18 дБ, запас по фазе -68,4◦
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ, ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
ЖЛАЧХ для систем строится, используя номограмму Солодовникова. По номограмме Солодовникова определяем частоту среза по заданному перерегулированию и времени регулирования системы:
σm = 60%,
tp = 600 c
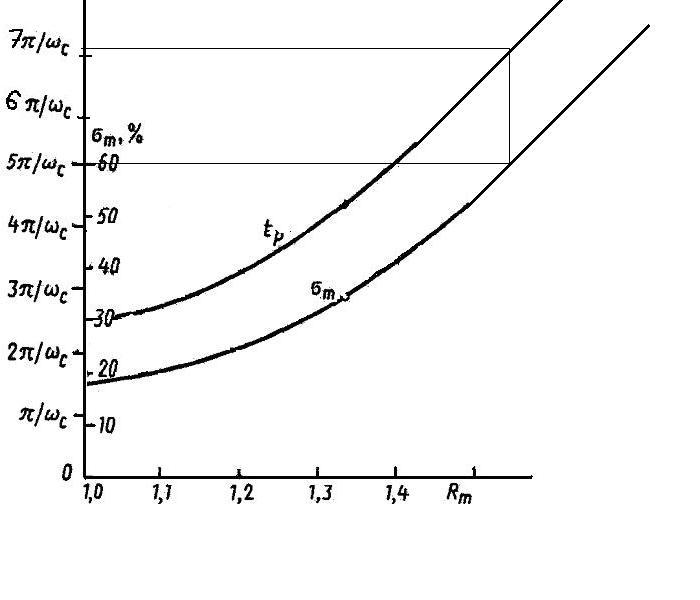
Рисунок 11 - Номограмма Солодовникова
Определение
частоты среза
 по
по
 и
и
 по
формуле:
по
формуле:
 (22)
(22)
 (23)
(23)
Определяем запретную зону. Для этого определяем рабочую точку и через нее проводим линию наклоном -20 дБ/дек.
 (24)
(24)
где
 - скорость изменения выходного сигнала,
- скорость изменения выходного сигнала,
 -
ускорение изменения выходного сигнала,
-
ускорение изменения выходного сигнала,
 -
точность прохождения сигнала.
-
точность прохождения сигнала.
 =0,00052,
=0,00052,

 .
.
Подставив численные выражения в (24) получим:
 .
.
Рабочая точка имеет следующие координаты А(0,1; 24,765).
Среднечастотная
асимптота ЖЛАЧХ проводится через точку
 с
наклоном (-20 дБ/дек), так как при большем
наклоне трудно обеспечить необходимый
запас устойчивости и допустимое
перерегулирование. Основные динамические
свойства связаны с длиной этой асимптоты.
Для ее определения примем показатель
колебательности М = 6,8 , тогда:
с
наклоном (-20 дБ/дек), так как при большем
наклоне трудно обеспечить необходимый
запас устойчивости и допустимое
перерегулирование. Основные динамические
свойства связаны с длиной этой асимптоты.
Для ее определения примем показатель
колебательности М = 6,8 , тогда:


Построенная ЖЛАЧХ системы представлена на рисунке 12.
0 Дб/дек
Рисунок 12 – ЛАЧХ, ЖЛАЧХ и ЛФЧХ системы
Передаточная функция ЖЛАЧХ:
 (25)
(25)
Определим постоянную времени и коэффициент усиления:
k=207

С учетом числовых значений выражение (25) примет вид:
Определим
запасы устойчивости построенного ЖЛАЧХ:
запас по амплитуде А=2,18 дБ, запас по фазе
 =-68,4
=-68,4 .
.
Построим ЛАЧХ параллельного корректирующего устройства. ЛАЧХ параллельного корректирующего устройства получается из ЛАЧХ желаемой в ее зеркальном отображении.
Передаточная функция ЛАЧХ корректирующего устройства представлена на рисунке 13
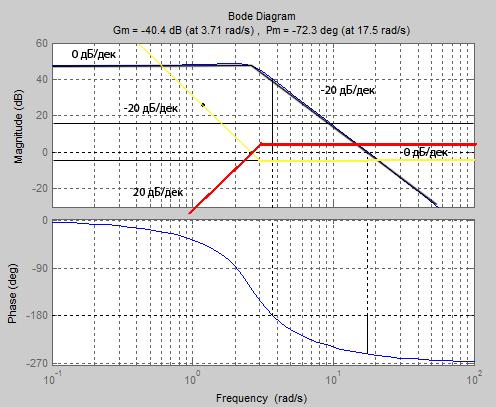
Рисунок 13 – ЛАЧХ, ЖЛАЧХ,ЛАЧХ корректирующего устройства и ЛФЧХ системы
Передаточная функция ЖЛАЧХ:
 (26)
(26)
Определим постоянную времени и коэффициент усиления:
к=-207

С учетом числовых значений выражение (26) примет вид:
Определим
запасы устойчивости построенного ЖЛАЧХ:
запас по амплитуде А=2,18 дБ, запас по фазе
 =-68,4
=-68,4 .
.