

ТЕСТ
ПО «ЛОКАЛЬНЫМ СИСТЕМАМ УПРАВЛЕНИЯ»
для специальности «Управление и
информатика в технических системах»5 Вариантов по 15 вопросов
Указание: все задания имеют 4 варианта ответа, из которых правильный только один. Номер выбранного ответа обведите кружочком в бланке для ответов.
Вариант 5.
1. Устойчивость дискретной системы.
1) Чтобы линейная импульсная система была устойчивой достаточно чтобы модули собственных значений матрицы А были меньше единицы.
![]()
2) Линейная импульсная система устойчива, если все корни лежат в круге единичного радиуса.
3) Линейная импульсная система неустойчива, если все корни лежат в круге единичного радиуса.
4) Чтобы линейная импульсная система была неустойчивой достаточно чтобы модули собственных значений матрицы А были меньше единицы.
![]()
2. Проведение обратных билинейных преобразований.
1)
Чтобы восстановить непрерывный сигнал
из квантованного с помощью идеального
фильтра (ИФ) с прямоугольной частотной
характеристикой необходимо выполнение
соотношения:
![]() (аналитическая формулировка теоремы
Котельникова-Шеннона).
(аналитическая формулировка теоремы
Котельникова-Шеннона).
2)
Это преобразование позволяет получить
дискретную передаточную функцию
линейного объекта из его исходной
непрерывной передаточной функции:
![]() .
При малом шаге квантования справедлива
следующая замена переменной:
.
При малом шаге квантования справедлива
следующая замена переменной:![]() .
.
3)Используют -преобразование, которое отражает окружность единичного радиуса на мнимую ось комплексной величины , с помощью подстановки:
![]() .
.
4)
чтобы в системе были процессы минимальной
длительности, все собственные числа
матрицы A
должны быть равны 0,![]() ,
тогда характеристическое уравнение
системы принимает вид:
,
тогда характеристическое уравнение
системы принимает вид:![]()
3. Методы линеаризации уравнений
1) Четыре метода линеаризации.
- Нелинейная функция в рабочей области раскладывается в ряд Тейлора.
- Заданные в виде графиков нелинейные функции линеаризуются в рабочей области прямыми.
- Вместо непосредственного определения частных производных вводятся переменные в исходные уравнения.
- Проводит линеаризации нелинейных характеристик по методу наименьших квадратов или методом трапеции.
2) Три метода линеаризации.
- Нелинейная функция в рабочей области раскладывается в ряд Тейлора.
- Заданные в виде графиков нелинейные функции линеаризуются в рабочей области прямыми.
- Вместо непосредственного определения частных производных вводятся переменные в исходные уравнения.
3) Два метода линеаризации.
- Нелинейная функция в рабочей области раскладывается в ряд Тейлора.
- Заданные в виде графиков нелинейные функции линеаризуются в рабочей области прямыми.
4) Не знаю.
4. Структурная схема прямого программирования.
1)
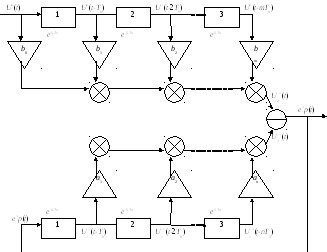
2)
3)
4) Не знаю.
5. . Понятие логарифмической амплитудно-частотной характеристики системы.
1)
2
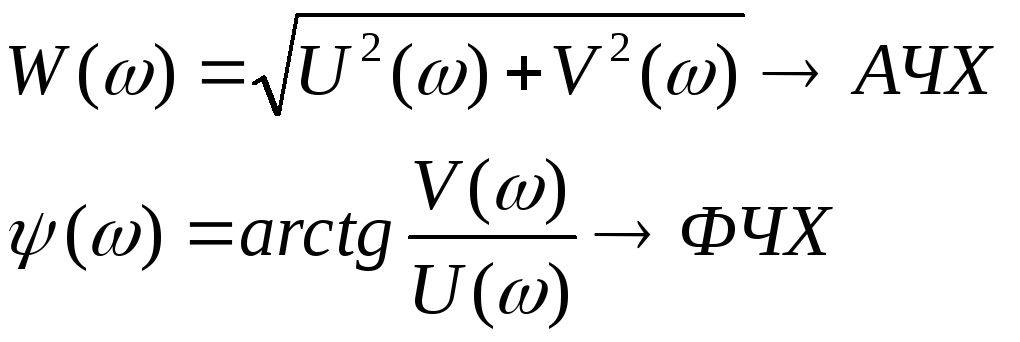 )
)
![]()
3)

4)
![]()
6. Выражение для учета дискретного элемента дискретной системы.
1)
![]()
2)

3)
![]() 4)
4)![]()
4) Не знаю.
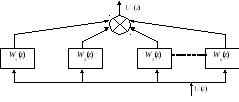
7. Передаточная функция последовательного соединения звеньев.
1)
![]()
2)
![]()
3)
![]()
4)
![]()
8.Критерий устойчивости Найквиста.
1)
Если
система устойчива в разомкнутом
состоянии, то для устойчивости замкнутой
системы необходимо и достаточно, чтобы
АФХ разомкнутой системы для частоты
w
, изменяющейся от
0
до
![]() не охватывает точку с координатами(-1,
j0).
не охватывает точку с координатами(-1,
j0).
2)
Если
система устойчива в замкнутом состоянии,
то для устойчивости разомкнуто й системы
необходимо и достаточно, чтобы АФХ
разомкнутой системы для частоты
w
, изменяющейся от
0
до
![]() не охватывает точку с координатами(-1,
j0).
не охватывает точку с координатами(-1,
j0).
3)
Если
система устойчива в разомкнутом
состоянии, то для устойчивости замкнутой
системы необходимо и достаточно, чтобы
АФХ разомкнутой системы для частоты
w
, изменяющейся от
0
до
![]() не охватывает точку с координатами(1,
j0).
не охватывает точку с координатами(1,
j0).
4)
Если
система устойчива в замкнутом р состоянии,
то для устойчивости разомкнутой системы
необходимо и достаточно, чтобы АФХ
разомкнутой системы для частоты
w
, изменяющейся от
0
до
![]() не охватывает точку с координатами(1,
j0).
не охватывает точку с координатами(1,
j0).
9. Понятие нелинейной статической характеристики.
1) Нелинейные звенья:
- с гладкой нелинейной характеристикой;
- с кусочно-линейной характеристикой (релейного типа, зононечувствительности, с насыщением);
- описываемые уравнениями, которые содержат произведение переменных или их производные и другие их комбинации;
логические нелинейные звенья.
2) Статические характеристики нелинейных звеньев могут быть однозначными, неоднозначными релейными, сложными неоднозначными в виде поля.
3) Все нелинейные звенья делят на аналитические (аналитические описания нелинейные характеристики) и неаналитические (характеристика, описывается с указанием логических условий).
4) Нелинейные САУ делятся на 2 группы:
1) с сопутствующими нелинейностями, т.е. нелинейности, проектированные как линеаризованные, но из-за наличия насыщения люфта, мертвого хода, сухого трения, являющиеся практически нелинейными.
2) с преднамеренными нелинейностями, т.е. проектируемые по заданию как нелинейные.
10. Эквивалентная передаточная функция двузначной нелинейности.
1)
![]()
2)
![]()
3)
![]()
4) Не знаю.
11. Выражение для выходного сигнала при статической линеаризации нелинейного элемента.
1)
![]()
2)
![]()
3)
![]()
4) Не знаю.
12. Передаточная функция встречно-параллельного соединения звеньев.
1)
![]()
2)
![]()
3)
![]()
4)
![]()
13. Понятие перерегулирования системы.
1)
Перерегулирование – это время, в течении
которого начиная с момента приложения
воздействия на систему отклонение
регулируемой величины
![]() от
ее установившегося значения
от
ее установившегося значения![]() будут
больше наперед заданного значения
будут
больше наперед заданного значения![]() .
.
2)
Перерегулирование
![]() - этоmax
отклонение
- этоmax
отклонение
![]() регулируемой величины от установившегося
значения, выражение в % от
регулируемой величины от установившегося
значения, выражение в % от![]() .
.
3) Перерегулирование определяет быстродействие переходного процесса.
4) Не знаю.
14. Критерий устойчивости Михайлова.
1)
САР будет устойчивой, если изменении w
от 0 до +![]() вектор
Д(jw)
начав движение из точки, лежащей на
положительной вещественной полуоси
комплексной плоскости, вращаясь против
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
вектор
Д(jw)
начав движение из точки, лежащей на
положительной вещественной полуоси
комплексной плоскости, вращаясь против
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
2)
САР будет устойчивой, если изменении w
от 0 до +![]() вектор
Д(jw)
начав движение из точки, лежащей на
отрицательной вещественной полуоси
комплексной плоскости, вращаясь против
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
вектор
Д(jw)
начав движение из точки, лежащей на
отрицательной вещественной полуоси
комплексной плоскости, вращаясь против
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
3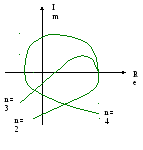 )
САР будет устойчивой, если измененииw
от 0 до +
)
САР будет устойчивой, если измененииw
от 0 до +![]() вектор
Д(jw)
начав движение из точки, лежащей на
отрицательной вещественной полуоси
комплексной плоскости, вращаясь по
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
вектор
Д(jw)
начав движение из точки, лежащей на
отрицательной вещественной полуоси
комплексной плоскости, вращаясь по
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
4)
САР будет неустойчивой, если изменении
w
от 0 до +![]() вектор
Д(jw)
начав движение из точки, лежащей на
положительной вещественной полуоси
комплексной плоскости, вращаясь против
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
вектор
Д(jw)
начав движение из точки, лежащей на
положительной вещественной полуоси
комплексной плоскости, вращаясь против
часовой стрелки, и нигде не обращаясь
в 0, обходит последовательно n
квадратов комплексной плоскости, где
n-
степень характеристического уравнения.
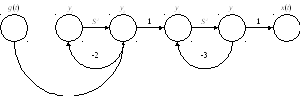
15. Понятие управляемости.
1) Процессы называются управляемыми, если на каждую переменную состояния y(t) можно целенаправленно воздействовать с помощью сигнала g(t) в течение конечного времени.
2) Процессы называются управляемыми, если на каждую переменную состояния y(t) можно целенаправленно не воздействовать с помощью сигнала g(t) в течение конечного времени.
3) Процессы называются управляемыми, если на переменную состояния y(t) можно целенаправленно воздействовать с помощью сигнала g(t) в течение времени.
4) Не знаю.