

-
Построение фазового портрета и переходного процесса
На основании передаточной функции линейной части запишем дифференциальное уравнение линейной части системы:
![]()
Уравнение нелинейного элемента:
![]()
Уравнение
сравнивающего элемента:
![]()
Будем считать, что
на вход системы подано воздействие
u(t)=0,
тогда
![]() ,
следовательно
,
следовательно
![]()
Запишем дифференциальное уравнение, описывающее данную нелинейную систему:
![]()
Решение данного уравнения будет строиться исходя из заданной нелинейности. В данном случае нелинейной частью системы является реле с зоной нечувствительности.
 Статическая
характеристика реле:
Статическая
характеристика реле:
y


 c
c


 -b
b x
-b
b x

 -c
-c
Рис. 12 Статическая характеристика реле
Характеристика нелинейного элемента (реле с зоной нечувствительности) разбивается на три линейных участка и для каждого из них составляется линейное дифференциальное уравнение.
 c,
если
c,
если
![]()
0, Если
-c,
если
![]()
![]()
 , если
, если
![]()
![]() , если
, если
![]()
![]() ,
если
,
если
![]()
Для построения фазового портрета и переходного процесса нелинейной системы воспользуемся программой MathCad.
Зададим значения коэффициентов и начальные условия:
![]()
![]()
![]()
![]()
![]()
![]()
Для упрощения расчетов, приведем дифференциальные уравнения для каждого участка к системе двух дифференциальных уравнений первого порядка:

![]()
![]()
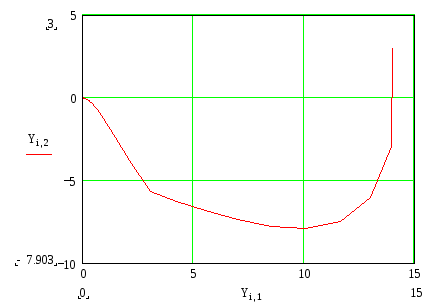
Рис.13 Фазовый портрет нелинейной системы регулирования
Построим переходный процесс, соответствующий данному фазовому портрету.
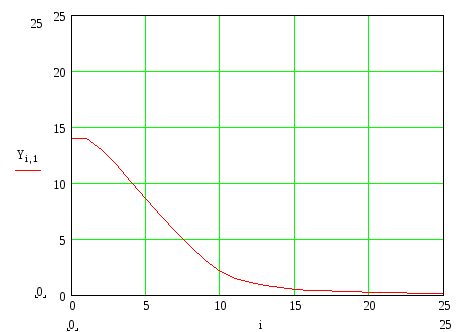
Рис. 14 График переходного процесса нелинейной системы
Вывод: Из фазового портрета видно, что имеет место устойчивый фокус, соответствующий затухающим колебаниям в системе регулирования. Качество управления, о котором можно судить по виду фазового портрета является высоким и не требует дополнительной коррекции.
Заключение
Целью курсовой работы являлось исследование и проведение анализа линейной и нелинейной системы автоматического регулирования.
В ходе выполнения курсовой работы был проведен расчет и анализ линейной системы автоматического регулирования температуры химического реагента. Полученная линейная система имеет высокое качество регулирования, но и соответствующий уровень сложности.
Целью введения нелинейного элемента было упрощение САР, т.е. предполагалась замена линейного исполнительного механизма нелинейным (релейного типа). После проведения расчетов и построения фазового портрета нелинейной системы можно сделать вывод, что введение нелинейности привело к упрощению системы, а качество регулирования осталось на том же уровне.
Список литературы
1. Автоматическое регулирование А. С. Клюев. – М.:Энергия, 1973. – 392 с: ил.
2. Самоучитель MathCad 11 Кирьянов Д. В. – СПб.: БХВм – Петербург, 2003. – 560 с.: ил.
3. MATLAB 6.X: программирование численных методов Кетков Ю.Л. – СПб.: БХВм – Петербург, 2004. – 672 с.: ил.
4. Автоматическое регулирование Иващенко Н.Н. – М.: Машиностроение, 1978. – 736 с.: ил.