

Міністерство освіти і науки України
Національний Гірничий Університет
Електротехнічний факультет
Кафедра електроприводу
РОЗРАХУНКОВО – ПОЯСНЮВАЛЬНА ЗАПИСКА
до курсового проекту з дисципліні
“Теорія Автоматичного Керування”
Виконав:
студент групи АУк – 05 – 1
Перьков Олександр Геннадійович
Керівник проекту:
к.т.н. доцент Азюковський Олександр Олександрович
м.Дніпропетровськ
2006
ЗМІСТ
1. ВСТУП…………………………………………………………….....3
2. ЗАВДАННЯ НА КУРСОВИЙ ПРОЕКТ……………………...........4
3. СИНТЕЗ САК………………………………………………………..6
3.1 Параметричний синтез регулятора системи з одиничним зворотним зв’язком………………………………………………………………………………..6
3.2 Синтез регулятора струму з урахуванням коефіцієнта датчика струму…………………………………………………………………………….11
3.3 Синтез регулятору струму за технічним критерієм оптимізації………....15
3.4 Синтез регулятору швидкості…………………………………………........18
4. РЕЗУЛЬТАТИ СИНТЕЗУ САК…………………………………...29
5. Амплітудно-частотні характеристики (ЛАЧХ) і фазочастотні характеристики(ФЧХ)…………………………………………………………..30
6. ЛІТЕРАТУРА………………………………………………………34
1. Вступ
Виконання курсового проекту з дисципліни „Теорія автоматичного керування” є одним із важливих етапів формування фахівця зі спеціальності «Електромеханічні системи автоматизації та електропривод».
Метою курсового проекту є придбання практичних навичок аналізу і синтезу систем автоматичного керування.
Під час виконання курсового проекту студенти користуються методом синтезу, що спирається на забезпеченні наперед заданих характеристик перехідного процесу (за Баттервортом, Бесселем, біноміальним розподіленням, симетричним та технічним критеріями) шляхом формування характеристичного поліному замкненої електромеханічної системи.
У методичних вказівках надані практичні рекомендації щодо виконання курсового проекту, що можуть бути використані при виконанні спецчастини дипломного проекту.
2. Завдання на курсовий проект
Виконати синтез системи автоматичного керування швидкістю (САК) електроприводу постійного струму (табл. 5).
Структура розроблювальної системи побудованої за замкнутим принципом, зображена на рис.1.1.
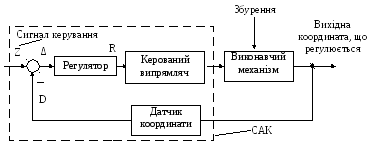
Рис. 1.1 Система автоматичного керування
Під час розрахунку системи автоматичного керування електроприводу постійного струму необхідно:
Отримати передатні функції тиристорного перетворювача, двигуна постійного струму.
Записати й визначити параметри передатної функції об’єкту керування в контурі струму. Розрахувати коефіцієнт перетворення датчика струму.
Виконати синтез регулятора струму за умови наявності одиничного зворотного зв’язку в контурі. Оптимізацію контуру слід виконувати за Баттервортом, Бесселем, біноміальним розподіленням.
Виконати синтез регулятора струму з урахуванням зворотного зв’язку в контурі. Оптимізацію контуру слід виконувати за Баттервортом.
Виконати синтез регулятора струму з урахуванням зворотного зв’язку в контурі. Оптимізацію контуру слід виконувати за технічним критерієм.
Для кожного з критеріїв оптимізації створити в «Simulink» математичну модель контуру струму.
Дослідити й порівняти перехідні процеси за усіма критеріями оптимізації при відпрацюванні контуром струму сигналу завдання амплітудою 10 вольт.
Виконати синтез регулятору швидкості користуючись технічним критерієм.
Виконати синтез регулятору швидкості користуючись симетричним критерієм.
Для кожного з критеріїв оптимізації створити в «Simulink» математичну модель контуру швидкості з підпорядкованим контуром струму. Підпорядкований контур струму повинен містити ПІ – регулятор, що розрахований за технічним критерієм (див. п.5).
Дослідити й порівняти перехідні процеси за швидкістю й струмом при відпрацюванні контуром швидкості з підпорядкованим контуром струму сигналу завдання що наведений на рис. 3.16, за умови наявності ступінчастого навантаження (від
 до
до ).
Ступінчасте навантаження подається
до системи після закінчення перехідного
процесу за швидкістю (рис. 3.17).
).
Ступінчасте навантаження подається
до системи після закінчення перехідного
процесу за швидкістю (рис. 3.17).Визначити передатні функції замкненого контуру струму й швидкості за різних критеріїв оптимізації.
За допомогою «MATLAB» отримати для різних критеріїв оптимізації ЛАЧХ, ФЧХ об’єктів керування (для контуру струму й контуру швидкості), регуляторів та замкнених контурів струму й швидкості.
Записати результати розрахунку курсового проекту до таблиці 6.
Таблиця 5
Вихідні дані
|
Параметри ДПС |
Параметри механізму | |||||||||
|
№ |
Тип |
РН, кВт |
nН, об/хв |
UН, В |
IН, А |
RA, Ом |
p |
JДВ, кгм2 |
nН.МЕХ., об/хв |
JМЕХ, кгм2 |
|
5 |
П21 |
0,3 |
1000 |
220 |
2 |
16,6 |
2 |
0,042 |
526 |
1*JДВ |