

курсовая работа / Курсовик ТАУ / Чередников_TAU
.docИСХОДНЫЕ ДАННЫЕ
Дана функциональная схема измерительной головки к внутришлифовальному станку

С труктурная
схема этой системы управления имеет
вид
труктурная
схема этой системы управления имеет
вид
где Q(t) – электрические сигналы,
X(t) – изменение диаметра отверстия,
У – система наружных и внутренних рычагов,
ПУ – рамка с пружинным параллелограммом, измерительным соплом и заслонкой,
ИУ – отсчетно-командное устройство,
ОР – станок,
Д – алмазные наконечники.
Принцип работы.
Алмазные наконечники (Д) прижимаются к обрабатываемой поверхности. При изменении диаметра отверстия сигнал проходит через систему наружных и внутренних рычагов (У) и попадает на рамку с пружинным параллелограммом, измерительным соплом и заслонкой (ПУ). Изменение давления в измерительной ветви, связанное с изменением зазора между измерительным соплом и заслонкой, преобразуется отсчетно-командным устройством (ИУ) в электрические сигналы для управления станком (ОР).
Передаточные функции каждого элемента системы:

![]()
![]()
![]()
![]()
![]()
ЗАДАНИЕ
1 Анализ линейной СУ: по данной структурной схеме системы управления (СУ) построить переходный процесс и частотные характеристики системы и по ним определить оценки качества СУ; исследовать систему на устойчивость; построить логарифмические характеристики и определить запасы устойчивости по фазе и амплитуде.
2 Анализ нелинейной СУ: осуществить преобразование нелинейной системы, линеаризацию нелинейного элемента; построить фазовый портрет.
1 АНАЛИЗ ЛИНЕЙНОЙ СУ
АНАЛИЗ ЛИНЕЙНОЙ СУ
1.1. Упрощение структурной схемы.
W6(p) – передаточная функция прямой цепи.
![]()
Определим передаточные функции замкнутой цепи (системы в целом) и разомкнутой цепи. Соответственно

![]()
1.2. Частотные характеристики системы.
Приведем передаточную функцию системы к частотному виду.

Выделим действительную и мнимую части:


![]()
![]()
Определим вид амплитудочастотной и фазочастотной функций и построим их графики:
![]()
![]()


Рис. 2 Фазочастотная характеристика
1.3. Переходный процесс системы.
Определим вид функции переходного процесса.
![]()
1
Рис. 3 Переходный процесс
 .4.
Оценки качества системы.
.4.
Оценки качества системы.
1.4.1. Прямые оценки качества системы.
По полученному переходному процессу (рис. 3) определяем:

- перерегулирование:
![]() ;
;
- время регулирования:
![]() ;
;
- время достижения
первого максимума:
![]() ;
;
- время первого
согласования:
![]() ;
;
- период колебаний:
![]() ;
;
- колебательность:
![]() .
.
1.4.2. Косвенные оценки качества системы.
По рис. 1:
![]()
- резонансная
частота:
![]() ;
;
- частота среза:
![]() ;
;
- полоса пропускания
(частота при
![]() ):
):
![]() ;
;
- колебательность:
![]() .
.
1.5. Анализ устойчивости СУ.
Исследуем систему на устойчивость с помощью критерия устойчивости по Ляпунову. Система устойчива тогда, когда все корни характеристического уравнения лежат в левой полуплоскости комплексной плоскости.
Определим корни
характеристического уравнения
![]()

Все корни находятся в левой полуплоскости комплексной плоскости. Следовательно, система устойчива.
1.6. Логарифмические характеристики системы. Определение запасов устойчивости.
Построим ЛАЧХ и ЛФЧХ разомкнутой системы (рис. 4).
И
Рис. 4 ЛАЧХ и ЛФЧХ системы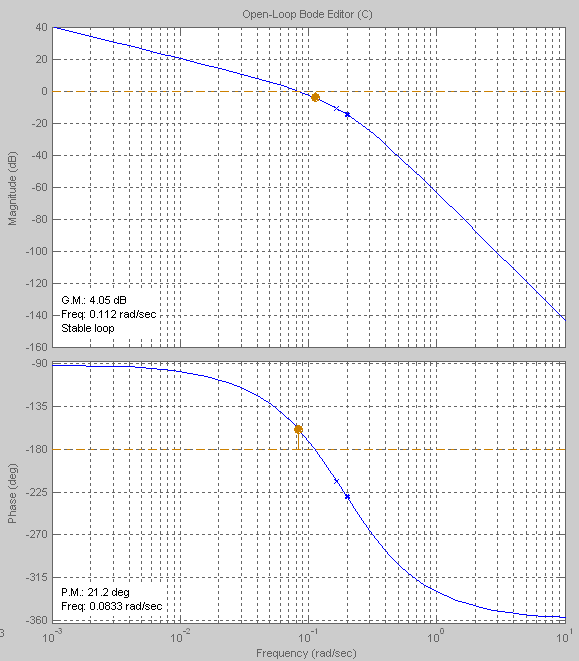 з
рисунка видно, что запасы устойчивости
по амплитуде и фазе составили 4,05 дБ и
21,2°, соответственно.
з
рисунка видно, что запасы устойчивости
по амплитуде и фазе составили 4,05 дБ и
21,2°, соответственно.
2 АНАЛИЗ НЕЛИНЕЙНОЙ СУ
В структурной схеме исходной системы
вместо ПУ поставим нелинейный элемент
с нелинейной характеристикой вида
структурной схеме исходной системы
вместо ПУ поставим нелинейный элемент
с нелинейной характеристикой вида
 (1)
(1)
Т огда
структурная схема примет следующий вид
огда
структурная схема примет следующий вид
П реобразуем
полученную структурную схему, разделив
ее на линейную и нелинейную части.
реобразуем
полученную структурную схему, разделив
ее на линейную и нелинейную части.
Разорвем систему перед нелинейным элементом.
X
F(x)
Wлч(p)
Xi u-X![]()








По определению передаточной функции
![]()
Следовательно:
![]()
Пусть на вход
подано постоянное воздействие
![]() .
Тогда перейдем
от самих величин к их отклонениям
относительно постоянного входного
воздействия. Введем обозначения:
.
Тогда перейдем
от самих величин к их отклонениям
относительно постоянного входного
воздействия. Введем обозначения:

Получаем следующую систему уравнений
 (2)
(2)
2.1. Построим фазовый портрет, используя систему уравнений (2) и (1). Пусть в начальный момент времени система выведена в точку с координатами (2;0).
Рис.6 Фазовый портрет
Переходный процесс нелинейной СУ
Рис.7 Переходный процесс нелинейной
СУ

2.2. Линеаризация нелинейного элемента.
Произведем линеаризацию НЭ методом гармонической линеаризации (ГЛ).
Коэффициенты ГЛ для данного нелинейного элемента

Т. к.
![]() ,
то
,
то
![]() .
.
Рассмотрим уравнение СУ:
![]() (1)
(1)
Для НЭ имеем
![]() .
(2)
.
(2)
Подставляя (2) в (1), получим
![]()
Рассмотрим следующее уравнение:
![]() (3)
(3)
В уравнении (3)
сделаем замену:
![]() ,
- и выделим действительную и мнимую
части.
,
- и выделим действительную и мнимую
части.

Из системы уравнений (4) определим частоту и амплитуду:
ω=0.

Решим последнее уравнение графически.
П усть
усть
![]() .
.
Из рис. 8 видно, что уравнение (5) не имеет решений. Следовательно, данный нелинейный элемент нельзя линеаризовать.
Заключение: до введения нелинейного элемента качество управления исходной СУ было хорошим, но требовала некоторой коррекции для уменьшения времени регулирования и перерегулирования; нелинейный элемент улучшил качество управления СУ (о чем свидетельствует фазовый портрет).