

курсовая работа / Kursov_tau / Курсовик Тау1
.doc
Б АЛАКОВСКИЙ
ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
АЛАКОВСКИЙ
ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖИНЕРО – СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЯ И ИНФОРМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ
КУРСОВАЯ РАБОТА
по дисциплине ТАУ
Исследование устойчивости линейных и нелинейных систем
автоматического управления
Выполнили ст. гр. УИТ-41в
Петрова Е.В.
Принял доцент каф. УИТ
Ефремова Т.А._______
«___»_______________2004г
2004
Вариант 25
Цель работы: освоение математических методов теории систем. Приобретение практических навыков анализа систем управления с применением современных программных и технических средств.
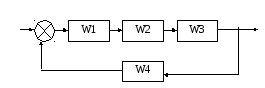
Рис. 1 Исходная схема.
Дано:
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Задание:
Часть 1: Линейная система.
-
Упростить систему.
-
Посчитать устойчивость (любым способом).
-
Построить переходную характеристику.
-
Построить амплитудно-частотную характеристику.
-
Построить ЛАЧХ и ЛФЧХ.
Часть 2: Нелинейная система.
Часть 3: Дискретная система.
-
Z – преобразование.
-
 -
преобразование.
-
преобразование. -
 -
преобразование.
-
преобразование. -
Посчитать устойчивость.
-
Построить ЛАЧХ и ЛФЧХ.
Часть 4: Вывод.
Решение:
Часть 1: Линейная система.
1.1 Преобразуем структурную схему.

Звенья
![]() соединены
последовательно, следовательно, имеем:
соединены
последовательно, следовательно, имеем:
![]()
В соответствии с данным преобразованием, структурная схема САУ примет вид:

Звенья W5(p), W4(p) включены встречно – параллельно (сумматор отрицательный), следовательно:
![]()
Получили передаточную функцию данной системы:
![]()
![]()
-
Посчитаем устойчивость системы.
Для того чтобы проверить устойчивость системы, воспользуемся теоремой Ляпунова и методом Гурвица.
Теорема: автоматическая система, описанная линейным дифференциальным уравнением с постоянными коэффициентами, будет устойчива, если вещественные корни дифференциального уравнения будут отрицательны, а комплексные корни будут иметь отрицательную реальную часть.
Найдем корни характеристического уравнения данной системы.
![]()
![]()
![]()
![]()
Данная система устойчива, так как характеристическое уравнение имеет один отрицательный действительный корень и два комплексных корня с отрицательной реальной частью.
Устойчивость по Гурвицу: для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были положительны.
Запишем характеристическое уравнение для рассматриваемой системы, получим:
![]()
.
Составим
определители Гурвица из коэффициентов
характеристического уравнения:![]() ;
;![]() ;
;![]() ;
;![]() .
.

![]()
![]()
Согласно критерию Гурвица, система устойчива, т.к. все миноры больше нуля.
-
Построим переходный процесс.

На вход
подается
![]() -функция
Хевисайда.
-функция
Хевисайда.
Функция, определяющая изменение выходной величины системы при подаче на ее вход единичного ступенчатого воздействия и при нулевых начальных условиях называется переходной функцией системы и обозначается: h(t).
![]()

По виду переходной характеристики можно также сказать, что данная система устойчива.
По переходному процессу определим прямые оценки качества.
а) Время переходного процесса – это время за которое регулируемая величина входит в пятипроцентную трубку.
б) Время первого согласования – это время за которое регулируемая величина первый раз достигает установившееся значение.
в) Перерегулирование – определяем максимальную динамическую ошибку.
![]()
г) Время нарастания регулируемой величины – это время за которое регулируемая величина достигает максимальное значение.
д) Число колебаний – определяется числом колебаний регулируемой величины за время регулирования процесса.
По виду данного переходного процесса прямые оценки качества системы не определяются.
-
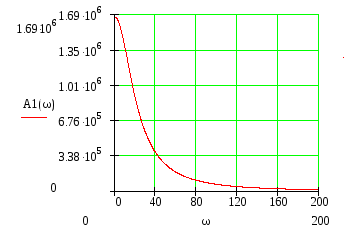
Построим график амплитудно-частотной характеристики.
Последовательность нахождения частотных характеристик:
-
Сделать замену в передаточной функции
 .
. -
Освободится от мнимых чисел в знаменателе путем умножения числителя и знаменателя выражения на комплексно-сопряженное знаменателю число.
-
Раскрыть скобки и привести подобные члены и разделить в числителе на сумму вещественного и мнимого полиномов.
-
Записать выражения для вещественной
 и мнимой
и мнимой
 частотных характеристик.
частотных характеристик. -
Записать выражения для амплитудно-частотной характеристики.
-
Построить графики.
Построение частотных характеристик по полученной передаточной функции.
![]()
Найдем корни характеристического уравнения данной системы.
![]()
![]()
![]()
![]()
Запишем передаточную функцию в следующем виде:
![]()
Умножим и числитель, и знаменатель на комплексно сопряженное число.
![]()
После всех преобразований получим:

Ведем
замену
![]()

Выделим мнимую и реальную части:


![]()
Построим график АЧХ.
Найдем косвенные оценки качества.
а) Колебательность
![]()
![]() ,
тогда
,
тогда ![]()
б) Резонансная частота – это часто при которой амплитуда максимальна.
![]()
в) Частота среза – это частота при которой амплитуда равна 1.
![]()
г) Полоса
пропускания частот – это наилучшее
провождение сигнала через систему или
коридор ограниченный прямой параллельной
оси
![]() с координатой
с координатой
![]() .
Из точек пересечения данной прямой с
АЧХ опускаем перпендикуляры на ось
.
Из точек пересечения данной прямой с
АЧХ опускаем перпендикуляры на ось
![]() ,
которые и ограничивают полосу пропускания
частот.
,
которые и ограничивают полосу пропускания
частот.
В нашем случае его нет.
-
Построим ЛАЧХ и ЛФЧХ.
Для построения ЛАЧХ и ЛФЧХ разомкнем систему, то получим
![]() ,
,
тогда

![]()

![]()


![]()

Запас по амплитуде
равен
![]() ,
а по фазе
,
а по фазе
![]() .
.
Часть 2: Нелинейная система.
Дана структурная схема нелинейной САУ:

Нелинейный элемент имеет вид:
Б А
Релейные
звенья для снижения аналитических
затрат необходимо вводить в режим
пограничного регулирования. Загрубим
крутизну статической характеристики
в области АБ, тогда для расчета линеаризуем
нелинейный элемент для этого найдем
коэффициент крутизны
![]() ,
который показывает как входная величина
преобразуется в выходную.
,
который показывает как входная величина
преобразуется в выходную.
![]()
Согласно полученному выражению можем преобразовать структурную схему.

Звенья
![]() соединены
последовательно, следовательно, имеем:
соединены
последовательно, следовательно, имеем:
![]()
В соответствии с данным преобразованием, структурная схема САУ примет вид:

Звенья W6(p), W7(p) включены встречно – параллельно (сумматор положительный), следовательно:
![]()
тогда:

Исходя из схемы, по правилу преобразования структурных схем, получим передаточную функцию системы:
![]() ,
,

Получили передаточную функцию данной системы:
![]()
Анализ влияния полученного коэффициента усиления на поведение системы!!!!
Часть 3: Дискретная система.
Математическая модель непрерывно-дискретной САУ имеет вид:

Передаточные функции дискретной и непрерывной частей имеет вид:
![]()
![]()
Дискретное управление на выходе непрерывно-дискретного элемента изменяется в строго определенные моменты времени, связанные с шагом квантования Т (Т=0,06), а все остальное время остается постоянным. Такой непрерывно-дискретный элемент называется элементом фиксатором нулевого порядка.
Дискретную
математическую модель линейного
дискретно-непрерывного объекта с
передаточной функцией
![]() и фиксатором нулевого порядка на выходе
можно получить, используя Z
– преобразование.
и фиксатором нулевого порядка на выходе
можно получить, используя Z
– преобразование.
![]()
Получили z-преобразованную передаточную функцию замкнутой системы.
Проверим данную систему на устойчивость. Используем для этого метод Шур-Кона.
Полученную z-преобразованную функцию подвергаем ω-преобразованию.
Далее произведем λ-преобразование полученной функции.
Строим переходный процесс, АЧХ и находим прямые и косвенные оценки качества.
Размыкаем исходную непрерывную систему и получаем передаточную функцию разомкнутой системы. В этом случае передаточная функция непрерывной части имеет вид:
Затем проводим z-, ω-, λ-преобразования полученной передаточной функции. По полученной функции строим ЛАЧХ и ЛФЧХ.
Выбор микропроцессора
Из данной системы выбираем наименее инерционное звено, граничная частота которого равна fгр=…….. . На основании этого выбираем частоту микропроцессора fмп=10fгр (Постоянные времени Тмп=0,1Тгр, где Тгр – минимальная постоянная времени контура исходной системы).
Выводы: данная работа проделана абсолютно зря, так как в действительности линейных систем не бывает.